2.5. Фундаментальные и прикладные научные исследования в области механики, систем управления и информатики
Тема. УПРАВЛЕНИЕ
. Исследования в области динамики сложных механических систем, проектирования орбит и построения математических моделей планирования космических экспериментов.Научный руководитель д.т.н. Р.Р. Назиров1. Применение геометрической интерпретации решений спутникового варианта задачи трех тел. Анализ эволюции прямого восхождения восходящего узла.
Был продолжен ретроспективный анализ эволюции орбит ИСЗ серии “Прогноз” под влиянием гравитационных возмущений со стороны внешних тел (Луны и Солнца). На первом этапе исследований использовался аппарат аналитических решений двукратно осредненной задачи Хилла, основываясь на концепции компланарности плоскостей орбиты Луны и эклиптики (напомним, что наклонение плоскости орбиты Луны к плоскости эклиптики составляет 5.5° , а прецессия орбиты Луны имеет периодом 19.5 лет). На основе аналитических решений был разработан геометрический метод анализа эволюции и выбора долгоживущих орбит ИСЗ.
Сопоставление аналитических решений с численными экспериментами, основанными на использовании численного интегрирования полной системы дифференциальных уравнений с учетом реальных гравитационных возмущений от Луны и Солнца, показали не только заметное количественное, но, во многих случаях, и качественное отличие в характере эволюции орбит и во времени их существования. Эти эксперименты показали существенную роль некомпланарности плоскостей орбиты Луны и эклиптики и подсказали направление дальнейших исследований.
Одним из наиболее существенных факторов, влияющих на развитие событий при наличии прецессии орбиты Луны, оказалась процессия орбиты самого ИСЗ, которая характеризуется эволюцией долготы, W , восходящего узла орбиты ИСЗ на плоскости эклиптики.
В первом приближении эволюция параметра W была рассмотрена в рамках аналитических решений двукратно осредненной задачи Хилла, основываясь на концепции компланарности плоскостей орбиты Луны и эклиптики. Эти решения содержат отщепляющуюся квадратуру, описывающую эволюцию параметра W . Отметим, что при отсутствии прецессии орбиты Луны, значения параметра W и его эволюция никак не влияют на события, связанные с эволюцией других орбитальных элементов:
e, i, w , и время существования ИСЗ.Исследование упомянутой квадратуры показывает, что скорость эволюции параметра W является периодической функцией, период которой совпадает с периодом эволюции орбитальных элементов
e, i.При учете прецессии орбиты Луны для классификации эволюционирующих орбит мы использовали следующие параметры:
Здесь R – радиус центрального тела (Земли); a – большая полуось, e – эксцентриситет, i – наклонение, w - аргумент перицентра (угловые элементы измерены относительно плоскости эклиптики).
На первом этапе рассматривалась эволюция орбит в рамках двукратно-осредненной задачи Хилла (без учета прецессии обиты Луны, в предположении компланарности плоскостей орбиты Луны и эклиптики).
Это позволило для рассматриваемого семейства орбит серии Прогноз с одинаковыми значениями c0 (типичное значение этого параметра составляет 16.7) найти границу, разделяющую область возможных значений параметров c1 (0 < c1 < 1), c2 (-0.4 < c2 < 0.6) на две части: одна соответствует орбитам с конечным временем баллистического существования, другая - орбитам с периодическим характером эволюцией орбитальных элементов e, i, w .
На основании параметрического анализа аналитических решений двукратно осредненной задачи Хилла был разработан геометрический метод выбора начальных значений орбитальных элементов с учетом характера эволюции соответствующих орбит и времени их баллистического существования.
Учет некомпланарности плоскостей эклиптики и орбиты Луны вносит весьма существенное изменение в характер эволюции орбит ИСЗ. Это выражается в том, что полученные в рамках двукратно осредненной задачи первые интегралы становятся функциями времени: y
1(t), y 2(t), начальные значения которых при t = t0 совпадают с c1, c2.Наиболее заметным является вклад прецессии орбиты Луны в эволюцию орбит, соответствующих значениям
c1, c2, лежащим вблизи границ (полученных в рамках двукратно-осредненной задачи), разделяющих области с различным характером эволюции орбит. Речь идет о границах, разделяющих области, соответствующие ротационному (при с2 > 0) и либрационному (при с2 < 0) характеру эволюции аргумента перицентра, w , а также границах, разделяющих область с периодическим характером эволюции орбитальных элементов e, i, w с одной стороны и область с конечным временем баллистического существования ИСЗ – с другой стороны.При учете прецессии орбиты Луны, весьма существенным становится начальное значение долготы восходящего узла орбиты спутника на эклиптике, W , и эволюция этого параметра.
Начальное значение W
0 и дата старта определяют начальное значение параметра j 0 (0° < j 0 < 360° ), а угловая скорость эволюции параметра j определяется разностью угловой скорости эволюции параметра W и, практически постоянной, угловой скорости прецессии орбиты Луны.Рассмотрен ряд численных экспериментов, показывающих зависимость эволюции орбит и времени существования спутника от начальных значений параметров
c1, c2 и j 0, при фиксированном значении c0 = 16.7.Проведенные численные эксперименты подсказывают направление дальнейших, более подробных, исследований эволюции орбит под влиянием гравитационных возмущений Луны и Солнца с учетом прецессии орбиты Луны.
Результаты опубликованы в докладах на международных конференциях и в Препринтах ИКИ:
Доклад на международной конференции памяти Ю.И. Гальперина, Москва, 4- 7 февраля 2003.
Доклад на международном симпозиуме по динамике космического полета (
ISSFD-17), Москва, 16-20 июня 2003.Preprint IKI, PR-2087
Автор: с.н.с. Прохоренко В.И., к.ф.-м.н., 313-56-45,
vprokhor@iki.rssi.ru2.(*) Гидродинамическая аналогия интегральных кривых дважды осредненной проблемы Хилла и линий тока плоского движения идеальной, несжимаемой жидкости
Получена гидродинамическая аналогия интегральных кривых дважды осредненной проблемы Хилла и линий тока плоского движения идеальной, несжимаемой жидкости. Эта аналогия позволяет обнаружить и обосновать некоторые не лежащие на поверхности свойства решения проблемы Хилла.
Проведенные исследования включают две части. Первая часть посвящена модели стратифицированной жидкости. Доказано, что имеет место строгая аналогия между интегральными кривыми дважды осредненной проблемы Хилла и линиями тока двумерного движения стратифицированной, идеальной, несжимаемой жидкости. Соответствующие изолинии рассматриваются при этом в плоскости (e
, q ), где e 2 = 1 - e2, q = 2w , e – эксцентриситет, w - аргумент перицентра.Полученная аналогия позволяет записать безразмерный параметр
Lc, от которого зависит период эволюции орбит, в виде контурного интеграла, подынтегральное выражение которого зависит только от двух первых интегралов, полученных М. Л. Лидовым. Это означает, что эти интегралы содержат информацию об эволюции орбиты не только в конфигурационном, но и в фазовом пространстве.Вторая часть базируется на модели однородной жидкости. Установлена приближенная аналогия, подобная полученной в первой части, относящаяся к потенциальному движению однородной, идеальной, несжимаемой жидкости вблизи границы области существования рассматриваемого решения
c2 ® 0, e ® 1, где с2 – одна из интегральных констант М. Л. Лидова.Получение этой аналогии позволяет доказать, что антисимметрия ротационного и либрационного режимов эволюции орбит при
c2 ® 0, e ® 1, обнаруженная В.И. Прохоренко, является следствием структуры поля скоростей эволюционного движения, а именно, его бездивергентности во всей области существования решения и потенциальности в окрестности ее границы. Детальное рассмотрение этой проблемы составит содержание отдельного Препринта, который готовится к печати. Предварительные результаты опубликованы в Препринтах ИКИ:Препринт ИКИ, Пр.- 2082, 28 с., 2003. Препринт ИКИ, Пр.- 2090, 21 с., 2003.
Научный руководитель: дтн, профессор Назиров Р.Р. Тел. 333-20-23 (сл.);
Автор с.н.с. Прохоренко В.И., к.ф.-м.н. 313-56-45 (дом.).
E-mail: vprokhor@iki.rssi.ru3. Математическая модель гидротермальных ячеек Томсона – Деланея в ледяной оболочке, покрывающей океан спутника Юпитера Европа. Обоснован вероятный механизм приливных колебаний системы жидкость, заполняющая ячейки, - ледяная оболочка.
На базе разработанных автором ранее математических моделей собственных колебаний системы исследованы спектры гидроупругих, гравитационных и инерционных колебаний (волн Россби) в гидротермальных ячейках Томсона - Деланея.
Рассмотрены вынужденные приливные колебания и приливные параметрические колебания, обусловленные возмущающим воздействием ближайших к Европе Галилеевых спутников Юпитера.
Установлено, что конфигурация областей неустойчивости в плоскости характерных безразмерных параметров системы отличается от конфигурации областей Айнса – Стретта. Этот аспект проблемы будет предметом дальнейших исследований.
Научный руководитель: Главный научный сотрудник, дтн, профессор Б. И. Рабинович.
Тел. 333-20-23 (сл.); 313-56-45 (дом.).
E-mail: vprokhor@iki.rssi.ru4.(*)Синтезирована математическая модель, описывающая возмущенное движение вращающегося КА, имеющего полости, частично заполненные жидкостью (на малую глубину). Рассмотрены случаи стационарного вращения КА и жидкости и нестационарного вращения (режимы раскрутки и торможения).
Получено обобщение решения Г. С. Нариманова задачи о “жидком гироскопе” с цилиндрической полостью, частично заполненной жидкостью, и вращающейся вокруг неподвижной точки на случай вращающегося КА. Это обобщение достигнуто по линии учета следующих новых факторов: возмущенное движение центра масс КА, наличие нескольких осесимметричных баков произвольной конфигурации (эллипсоид вращения, сфера, тор), вязкость жидкости, наличие внутрибаковых узких радиальных ребер, возможность отличия угловых скоростей вращения тела и жидкости и их изменения по времени, наличие систем одноосной ориентации и стабилизации КА.
Проведено сравнение полученных моделей с математической моделью вращающегося КА с упругими элементами типа штыревых антенн.
Основные результаты опубликованы в журналах “Полет” и
J. of Structural Control: Полет № 4, с. 51 – 54, 2003. Полет № 8, с. 55 - 60, 2003. Полет № 10, с. ,2003. J. of Structural Control. No 1, Vol.10, pp 25 – 39, 2003. Научный руководитель: Главный научный сотрудник, д.т.н., профессор Б. И. Рабинович. Тел. 333-20-23 (сл.); 313-56-45 (дом.). E-mail: vprokhor@iki.rssi.ru5.(*)Разработка метода оптимизации перелетов с малой тягой при ограничениях на направление тяги и его применения.
Проанализированы ограничения на направление малой тяги в зависимости от способа ориентации КА. Проведены теоретические исследования и разработана теория оптимальной тяги при ограничениях на ее направление с использованием принципа максимума Понтрягина. Эта теория позволяет находить оптимальную тягу в явном виде как функцию времени для линейных и некоторых видов нелинейных ограничений. Для оптимизации перелетов с малой тягой с учетом ограничений на ее направление применен модифицированный метод транспортирующей траектории, адаптированный к
случаю наличия ограничений. Создана программа расчетов на компьютере и проведены модельные расчеты, подтвердившие высокую эффективность метода.Результаты работы представлены в докладе на
XVII Международном симпозиуме по динамике космического полета в Москве 16–20 июня 2003 г.Автор с.н.с. Суханов А.А., к.ф.-м.н.
E-mail: sasha@dem.npe.br 6. Разработка метода решения краевой задачи для задачи трех тел в рамках модели движения Хилла (решение задачи Ламберта для задачи трех тел).Проанализированы наиболее типичные переходы между окрестностями Земли и солнечно-земных точек либрации
L1 и L2. На основе этого анализа выбраны 37 опорных орбит и разработан метод нахождения траектории перелета между двумя заданными точками за заданное время с помощью опорных орбит. Иллюстративная таблица с орбитами приведена на рисунке:|
Transfer type |
No. of complete orbits |
Orbit Type |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
E–E |
0 |
|
|
– |
– |
– |
– |
– |
– |
– |
|
E–L |
0 |
|
|
|
|
– |
– |
– |
– |
– |
|
L–E |
0 |
|
|
|
|
– |
– |
– |
– |
– |
|
L–L |
0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Автор с.н.с. Суханов А.А., к.ф.-м.н.
E-mail: sasha@dem.npe.br
7.(*) Разработка эффективного численного метода решения задачи робастного оценивания с линейными ограничениями на оцениваемые параметры.Рассматривается возможность эффективного численного решения задачи робастного оценивания с линейными ограничениями на оцениваемые параметры. Показывается, что при наличии ограничений проблематично получить решение из двойственной задачи квадратичного программирования. Предлагаются и сравниваются два метода.
Первый метод сводится к последовательному применению взвешенного метода наименьших квадратов с ограничениями. При этом веса вычисляются на каждой итерации по конечным формулам.
Второй метод основан на сведении упомянутой задачи квадратичного программирования к многопараметрической задаче линейного программирования, трудоемкость решения которой слабо зависит от числа ограничений на оцениваемые параметры и коэффициента "загрязнения" нормального распределения в модели измерений. Решение последней задачи эффективно осуществляется методом генерации столбцов. При этом на каждом шаге имеется оценка для оптимума, а двойственный вектор оптимального решения дает искомый вектор оценок.
Результаты представлены в журнале
Известия РАН ТиСУ № 4, 2003
Научный руководитель в.н.с. Бахшиян Б.Ц., д.ф.-м.н.
E-mail: bbakhshi@iki.rssi.ru
8. Решение задачи оптимального гарантирующего оценивания для динамических систем с запаздыванием.Рассматривается задача оптимального гарантирующего оценивания для динамических систем с запаздыванием. Возмущения в системе и шумы измерений предполагаются комбинированными. Это означает, что они представляют собой сумму неопределенных ограниченных сигналов и процессов типа белого шума. Решение этой проблемы сводится к сложной негладкой экстремальной задаче. Для ее приближенного решения негладкая проблема заменяется на некоторую гладкую. В предположении, что запаздывание мало по сравнению со временем наблюдения из анализа гладкой задачи получены субоптимальные конструктивные алгоритмы оценивания. Для этих алгоритмов построены явно вычисляемые оценки их неоптимальности. Численные расчеты показывают высокую эффективность предложенного подхода. Задача окончательно решена, и результаты представлены журнале:
Journal of Dynamic Systems, Measurement, and Control. Special Issue: Time Delayed Systems. 2003, vol.125, pp.229-235.
Руководитель работы в.н.с. Матасов А.И., д.ф.-м.н.
E-mail : amatasov@rssi.ru
9. Решение задачи точности оценивания параметров при наличии немоделируемых возмущений для различных моделей ошибок.При движении объекта в пространстве некоторые возмущения не могут быть известны точно. В зависимости от степени неопределенности их задания могут быть найдены гарантирующие характеристики точности оценивания. Рассмотрены случай, когда для случайных составляющих возмущения ограничены элементы ковариационной матрицы, а детерминированные составляющие ограничены по модулю.
Получены гарантирующие характеристики точности оценивания параметров и подготовлены материалы для препринта.
Автор в.н.с. Бахшиян Б.Ц., д.ф.-м.н.
E-mail: bbakhshi@iki.rssi.ru10. (*) Проведение исследований по управляемости различных дискретных систем. Разработка метода продолжения в задачах управления дискретными системами с ограничениями.
Были продолжены исследования управляемых систем, описываемых линейными разностными уравнениями. Управляющие воздействия считаются ограниченными одновременно по величине (геометрически) и по импульсу (интегрально). Изучается множество состояний фазового пространства, в которые возможно приведение системы из начала координат, а также множество состояний, из которых возможно приведение системы в начало координат. Результаты изложены в журнале: Автоматика и Телемеханика, 2003, №11
Были изучены задачи синтеза управления нелинейными неавтономными скалярными системами с дискретным временем под действием случайных аддитивных независимых возмущений. Целью управления является достижение неслучайного фиксированного состояния с вероятностью 1 за конечное число шагов или асимптотически. Впервые получены соответствующие необходимые условия разрешимости таких задач, определяющие ограничения, накладываемые на класс распределений случайных возмущений.
Результаты изложены в журнале: Известия РАН. Теория и системы управления, 2003, №3, с. 17 – 29.
Исследовались задачи управляемости и 0-управляемости однородных и неоднородных билинейных систем с дискретным временем и ограниченным управлением. Изучены некоторые задачи управления системами с треугольными (одновременно верхними или нижними) матрицами. К такому виду, очевидно, могут быть преобразованы системы с матрицами, которые одновременно приводимы к треугольному виду. Получены необходимые и достаточные условия 0-управляемости. Показано, что рассмотренные системы 0-управляемы в том и только в том случае, когда минимальное время достижения 0 равномерно ограничено и задача 0-управляемости имеет инвариантное относительно начального положения допустимое решение.
Результаты изложены в журнале: Известия РАН. Теория и системы управления, 2003, №1, с. 5 – 9. Автор в.н.с. Сиротин А.Н., д.ф.-м.н.
11. Проведение исследований по эволюции высокоэллиптических орбит.Была исследована эволюция
высокоэллиптических орбит с целью определения начальных параметров движения, обеспечивающих практически неограниченное время баллистического существования. При этом учитывались технические ограничения, связанные с возможностями имеющихся носителей и космодромов. Было показано, что в рамках этих ограничений такие параметры существуют, так что начальная эллиптическая орбита становится почти круговой и при наличии возможностей весьма малых коррекций эта орбита может существовать бесконечно долго. Результаты исследований были использованы при разработке нового варианта проекта СРГ на базе платформы Ямал.Проведены исследования по возможностям запуска аппаратов в коллинеарные солнечно-земные точки либрации и их окрестности с промежуточных высокоэллиптических орбит типа орбиты Молнии или Ока в режиме попутного запуска при небольших дополнительных импульсах. Показана реализуемость таких методов практически в течение всего года. Работа выполнялась в рамках подготовки предложений по новому проекту по исследованию проблем космической погоды.
Автор в.н.с. Эйсмонт Н.А.., к.т.н.
E-mail: neismont@iki.rssi.ru12. Проведен комплекс экспериментальных и теоретических исследований по высокоточному сближению и посадке управляемых механических систем..
Алгоритм системы управления основан на так называемом принципе “алгоритм с моделью”, предложенном И.М.Сидоровым, который отфильтровывает помехи в наблюдаемом сигнале и позволяет привести параметры системы в заданный момент времени к необходимым значениям.
В зависимости от рассматриваемых задач исполнительными органами управления могут быть реактивные двигатели, водометные двигатели и др.
Для экспериментальной отработки предложенного подхода была изготовлена и испытана действующая модель универсальной управляемой платформы, предназначенной для автономной высокоточной установки грузов при строительно-монтажных работах..
Проведенные экспериментальные исследования показали, что при наличии суммарной тяги реактивных двигателей (рабочее тело – сжатый воздух) установленных на платформе порядка 0,5% от веса груза можно достичь точности установки не хуже 5 мм.
Следующим этапом отработки указанной методики было создание действующей модели подводного автоматического аппарата, предназначенного для поиска заданных целей и выполнения высокоточных посадок в условиях гидроневесомости на площадки установленные под произвольным углом к свободной поверхности волы.
Проведенные эксперименты показали возможность достижения высокой точности наведения и посадки аппарата даже при наличии существенных помех, обусловленных турбулентностью в экспериментальном наливном бассейне.
Предложенные методики и разработанные высокоточные оптические координатные датчики могут быть использованы при создании средств автоматизации строительно-монтажных работ – управляемой свободно летающей платформой, способной выполнять транспортные операции в окрестности орбитальной космической станции или подводного спасательного аппарата.
По результатам НИР (Ларри) Управлением кораблестроения МО на 2004 г. Планируется открытие ОКР по созданию средств наведения и стаковки глубоководного спасательного аппарата “Бестер”.
Руководители: к.т.н. О.М.Клишев 333-23-56, д.ф-м.н. И.М.Сидоров.
Публикации по данной работе:
Назиров Р.Р., Сидоров И.М., Фролов В.А. О некоторых методах автоматического управления относительным движением объектов на околоземных орбитах. //Космические исследования. 2003 № 1. C. 82-94.
Н.Н. Иванов, И.М. Сидоров
O возможности реализации комплексного эксперимента по развертыванию тросовой системы на основе использования второй ступени изделия “Космос 3М” //Полет // №8. 2003г.Сидоров И.М. Предложения о построении группировки космических объектов, предназначенной для решения транспортных и энергетических задач. Принят к печати //Космические исследования. 2004 № 1.
Клишев О.П., Сидоров И.М., Фролов В.А., Чурилов Г.А. Автоматическое управление движением объектов в водной среде. Принят к печати // Микроэлектронные системы.
Н.Н. Иванов, И.М. Сидоров, Е.В. Емельянова. Исследование динамики управления орбитальной тросовой системы при ее развертывании. Подготовлен к печати в //Космические исследования.
13. Разработан макет программного обеспечения подсистемы обработки информации, поступающей от телевизионного датчика. Информация обрабатывается с целью формирования данных для системы управления стыковкой подводного спасательного аппарата.
Для осуществления задач по спасению экипажа подводного аппарата, терпящего бедствие, необходимо осуществить стыковку подводного спасательного средства и подводного аппарата. В процессе стыковки необходимо осуществлять управление пространственным и угловыми координатами спасательного средства, имеющего массу в десятки тонн, с высокой точностью (допустимое взаимное смещение стыковочных устройств исчисляется сантиметрами). Решение этой задачи может быть существенно упрощено, если использовать автоматическую систему управления стыковкой.
Для функционирования автоматической системы управления стыковкой необходимо сформировать оценки пространственного и углового положения спасательного аппарата относительно специального посадочного знака, размещенного на стыковочном устройстве подводной лодки.
Система технического зрения, решающая эту задачу, работает в достаточно специфических условиях, обусловленных значительным поглощением светового излучения в водной среде и значительным обратным рассеиванием. Это резко ограничивает дальность действия системы технического зрения и предъявляет очень жесткие требования к линейности телевизионного датчика и к качеству систем автоматического регулирования экспозиции. Кроме того, в водной среде могут присутствовать взвешенные частицы, которые затрудняют распознавание стыковочного знака.
Для исследования возможностей реализации системы технического зрения, решающей указанную выше задачу, разработана моделирующая программа. Программа учитывает характер распространения светового излучения в водной среде, эффекты поглощения и обратного рассеивания и наличие взвешенных частиц. Для упрощения моделирования предполагается, что световое излучение претерпевает однократное обратное рассеивание в каждом бесконечно тонком слое воды (рис. 1). Программа учитывает неидеальность функции рассеивания точки.
В программе моделируется движение спасательного аппарата (и, соответственно, телевизионной камеры). Движение является суммой детерминированной составляющей и случайных возмущений по линейным и угловым координатам.
Программа осуществляет поиск, обнаружение и распознавание стыковочного знака. Распознавание осуществляется путем генерации гипотез, оценивания их вероятности и выбора наиболее вероятной гипотезы. После распознавания стыковочного знака программа переходит в режим слежения за стыковочным знаком. В этом режиме осуществляется оценивание пространственных и угловых координат спасательного аппарата относительно стыковочного знака. Полущенные оценки подвергаются фильтрации с целью уменьшения флуктуационных ошибок оценивания.
Получены оценки затрат времени на поиск, обнаружение и распознавание стыковочного знака, а также на слежение за стыковочным знаком, получение оценок координат и на фильтрацию этих оценок. Показано, что в режиме слежения обработка информации может осуществляться в реальном времени.
Руководители: к.т.н. О.М.Клишев 333-23-56, к.т.н. В.А.Гришин
Публикации по данной работе: В.А.Гришин “ТВ датчик системы управления движением”. Представлено в качестве доклада на 11-ю Всероссийскую конференцию “Математические методы распознавания образов”, 2003 г.
Тема ВЕКТОР – УС. Исследования, разработка и моделирование аппаратно-программных решений задачи высокоточных астроопределений, проводимых для управления ориентацией космических объектов.
Научный руководитель д.т.н. Г.А. Аванесов, тел.333-30-89, dry@wildcat.iki.rssi.ru
За отчетный период предложены и разработаны технические предложения по аппаратно-программному комплексу звездного координатора, решающего без гироинерционных датчиков две навигационные задачи:
– определение инерциальной ориентации при повышенных угловых скоростях,
– определение вектора угловой скорости изменения инерциальной ориентации.
В основе решения вышеуказанных задач положено сочетание цифрового и аналогового накопления видеосигналов, получаемых при регистрации изображений звездного неба. Для этого фотоприемное устройство звездного координатора (ФПУ) будет построено по схеме, приведенной на рис.1.
Аналоговый сигнал, формируемый ПЗС-матрицей поступает на видеопроцессор, в котором расположены видеоусилитель, ДКВ и АЦП. Оцифрованный сигнал поступает на выход К1 и на вход цифрового запоминающего устройства (ЗУ). В цифровом ЗУ организована возможность суммирования сигналов за
N кадров. Цикл накопления сигнала в ПЗС и считывания одного кадра выбран примерно равным 100 мсек. В цифровом ЗУ может суммироваться от 1 до 128 кадров.В ФПУ планируется использовать ПЗС-матрицу с числом элементов
~ 1000х1000 и размером элемента ~ 7х7 мкм. Если у этой ПЗС-матрицы будет
При скорости углового движения КА около 1000² /сек условия цифрового накопления нарушаются, т.к. проекция звезды на ПЗС-матрицу проходит своей геометрический размер, примерно, за 125 мсек. Соответственно, надежно будут фиксироваться изображения звезд до ~ 5
m, число которых в кадре в среднем составит 2.Можно предположить, что с учетом более высокой чувствительности
используемой ПЗС-матрицы
Предполагается, что обработка видеоинформации в перспективном звезд
ном координаторе будет выполняться в двух независимых каналах, выполняющих самостоятельные задачи:
– определение параметров инерциальной ориентации
– определение параметров относительного углового движения.
Цель двухканальной обработки заключается в следующем. Канал определения параметров ориентации может выполнять свои функции, когда регистрируется более 4-х звезд, угловые расстояния, между которыми строго зафиксированы. Условия строгой фиксации угловых расстояний между звездами могут быть выполнены в двух случаях, когда их изображения получены в одном кадре (малые скорости углового движения) и когда изображения звезд получены в нескольких последовательных кадрах, взаимное расположение которых точно измерено.
Канал определения угловой скорости может работать, имея изображение только 2-х звезд. По изображениям 2-х звезд, полученным в некоторой последовательности кадров можно определить значение относительного движения звезд от кадра к кадру. Используя эту информацию можно реализовать две схемы последующей обработки видеоинформации:
– при малых угловых скоростях (до 300²
/сек) можно повысить
(в ~ 20 раз) частоту выдачи информации о параметрах 3-х осной ориентации КА,
– при больших угловых скоростях (выше 300² /сек) измерения относительного углового перемещения позволяют установить взаимное расположение нескольких последовательных кадров и таким образом накопить необходимое для распознавания число звезд, сохраняя высокую частоту выдачи параметров о 3-х осной ориентации КА.
Данные об относительном угловом перемещении звезд в перспективе можно использовать также для управления процессом накопления путем смещения адресации памяти с учетом накапливающегося в интервалах между экспозициями сдвига элементов предыдущего и последующего кадров, что также повышает возможность использования звездных координаторов для работы в условиях высоких угловых
скоростейПри условии уменьшения фокусного расстояния объектива с 60 мм до 40 мм при относительном отверстии 1,5 прибор сможет определять параметры 3-х осной ориентации и угловую скорость при угловом движении КА со скоростью до 1,5–2° /сек.
Переход к коротким временам накопления параллельно решает еще две задачи немаловажные для звездных координаторов:
– снижается чувствительность прибора к фоновым засветкам во столько раз, во сколько уменьшается время накопления: для приборов БОКЗ и БОКЗ-М, имеющих время накопления и время считывания информации с ПЗС-матрицы 2,6 сек, чувствительность к фоновой засветке снизится в 26 раз,
– снижается чувствительность прибора к воздействию протонов также во столько раз, во сколько уменьшается время накопления.
Использование цифрового накопления расширяет динамический диапазон прибора в число раз, равное числу шагов накопления.
Укрупненная схема обработки видеоинформации в перспективном звездном координаторе показана на рис.2.
Как уже упоминалось, канал определения параметров инерциальной ориентации
(К2) получает видеоинформацию после цифрового накопления в ФПУ. Устройство цифрового накопления после приема заданного числа кадров переходит под управление от процессора, входящего в состав канала определения параметров инерциальной ориентации, и используется им до завершения процедуры вычисления. При этом ПЗС-матрица и видеопроцессор продолжают формировать видеоинформацию в заданном темпе, которая поступает на обработку в канал определения параметров относительного углового движения (К1) КА.
Канал К2 выполняет обработку, содержание которой повторяет те же операции, которые делает процессор прибора БОКЗ-М.
Канал К1 должен выполнить полный цикл обработки за 100-125 мсек. Его главная задача определить величину приращения движения за каждый межкадровый промежуток. Эта задача решается путем измерения величины смещения звезд в последующем кадре по отношению к предыдущему. Чтобы сделать возможной обработку кадра изображения за столь короткое время предполагается использовать на этапе предварительной обработки устройство типа “Фрагментатор”, хорошо зарекомендовавшее себя в приборах БОКЗ и БОКЗ-У. “Фрагментатор” представляет собой аппаратно-программное устройство, выполняющее функции амплитудного селектора. Каждому значению яркости, превысившему заданную величину порога, приписываются его координаты в системе координат ПЗС-матрицы. Поскольку ПЗС-матрица работает в режиме малых времен накопления, число регистрируемых звезд не должно превышать 2-4. При появлении большего числа звезд, оно может быть уменьшено путем повышения порога отсечки. Считая, что размеры каждой звезды не превышают 25 элементов изображения, получим, что в каждом кадре в обработку будет поступать не более 100 элементов и дополнительная информация об их координатах. Ожидается, что обработка такого объема информации окажется посильной для процессора, используемого в БОКЗ-М.
Вычисление значения приращения углового движения за межкадровый промежуток по каждой координате суммируется с очередным значением инерциальной ориентации, чем заполнится интервал времени, отделяющий один цикл определения инерциальной ориентации от другого.
В приборах БОКЗ-М продолжительность одного цикла выполнения параметров инерциальной ориентации КА составляет 3сек, что диктуется требованиями по периодичности обновления информации об ориентации. Ограничение по времени заставляет отказываться от некоторых процедур обработки, которые, в случае их использования, могли бы повысить вероятность и точность астроопределений.
В случае использования канала К1, позволяющего формировать информацию об изменениях параметров ориентации ограничения по времени обработки данных в канале К2 будут сняты, либор заметно смягчены.
Фактически, канал К1 по своей сути является оптическим измерителем вектора угловой скорости, т.е. может выполнять некоторые функции гироскопических приборов, имея при этом то преимущество, что не требует коррекции масштабных коэффициентов.
Вычисление значения текущего приращения углового движения могут в перспективе быть использованы для управления процессом цифрового накопления. Решение этой непростой задачи позволит улучшить условия накопления при больших скоростях углового движения КА, т.е. расширить функциональные возможности звездного координатора.
Введение цифрового накопления, используемого в канале К2, создаст некоторые дополнительные возможности в организации его работы. В отличие от ПЗС-матрицы, допускающей лишь последовательный поэлементный съем информации, цифровая память имеет координатный доступ. Это позволяет после определения начальной ориентации перейти к слежению за перемещением распознанных в каталоге звезд, обращаясь только к соответствующим участкам цифровой памяти, что ведет к уменьшению объема информации, обрабатываемой в канале К2.
Суммируя все вышеизложенное, отметим, что использование современной
ПЗС-матрицы, введение цифрового накопления и дополнительного канала определения параметров относительного движения КА (канал К1) позволят в перспективе улучшить ряд параметров звездных координаторов по отношению к БОКЗ-М:
– повысить быстродействие в 20-30 раз,
– расширить диапазон угловых скоростей, примерно в 10 раз,
– повысить помехозащищенность прибора по отношению к световым помехам не менее чем в 100 раз,
– повысить помехозащищенность прибора по отношению к протонному излучению в 20-100 раз.
Все перечисленное свидетельствует о целесообразности создания следующего поколения звездных координаторов на основе изложенной концепции.
Перспективному звездному прибору присвоено условное название ВКЦН (Видеокамера с цифровым накоплением). Его основные ожидаемые характеристики приведены в табл.1.
Таблица 1
|
Сравнительные характеристики разработанных приборов |
||||
|
№ п.п. |
Параметр |
БОКЗ |
БОКЗ-М |
ВКЦН |
|
1. |
Поле зрения круговое, (град) |
8 |
8 |
11 |
|
2. |
Число процессоров |
0* |
1 |
2 |
|
3. |
Число звезд в каталоге |
8500 |
8500 |
5000 |
|
4. |
Частота обновления информации об ориентации (Гц) |
0,25 |
0,3 |
4 ¸ 8 |
|
5. |
Форма представления результата |
Кватернион ориентации* * |
||
|
6. |
Шина обмена данными |
MIL STD–1553В ГОСТ 26765.52-87 |
||
|
7. |
Среднеквадратическая ошибка определения ориентации осей внутренней системы координат в инерциальной (угл.сек): – по осям Х, У – по оси Z |
20 1-2 |
20 1-2 |
10 1-1,5 |
|
8. |
Максимальная скорость углового движения КА по отношению к небесной сфере (град/сек) |
0,1 |
0,1 |
0,5* * * |
|
9. |
Масса, включая бленду, обеспечивающую работоспособность прибора при засветке Солнцем под углом 30° к оптической оси (кг) |
4,3 |
4,3 |
3,5 |
|
10. |
Энергопотребление (вт) |
12 |
12 |
8 |
Примечания:
* В приборе БОКЗ обработка информации осуществляется в бортовой ЭВМ.Форма представления результата может быть в виде
Ожидается, что максимальная допустимая скорость углового движения КА по отношению к небесной сфере будет доведена до 2° ¤ с.
Финансирование по теме в 2003 году составило 1,67 млн.руб. вместо запланированных 7 млн.руб., что не позволило осуществить натурное моделирование решения задачи.
Тема ВСКИ
. Исследование проблемы прецизионного координатно-временного обеспечения (КВО) видеоспектрометрических космических исследова-ний Земли и других небесных тел, реализуемого по данным бортовых навигационных измерений. Разработка и моделирование аппаратно-программных решений задачи КВО.Научный руководитель д.т.н. Г.А. Аванесов, тел.333-30-89, E-mail: dry @ wildcat.iki.rssi.ru
За отчетный год разработаны предложения по методике и комплексу технических средств прецизионного определения орбитальной ориентации космического аппарата и координатной привязки проведенных с него съемок земной поверхности.
Тема ВСКИ предусматривает решение проблемы координатно-временного обеспечения съемок из космоса Земли и других небесных тел.
Эта проблема включает в себя разработку комплекса бортовых и наземных аппаратных средств и программных продуктов, обеспечивающих решение следующих задач:
1) определение параметров орбиты и местоположения на ней КА;
2) определение инерциальной, орбитальной и других видов ориентации КА;
3) формирование системы бортового и единого (Гринвичского) времени;
4) координатная привязка материалов съемок и измерений, проводимых с КА, осуществляемая в различных системах координат – звездной, орбитальной, географической, КА и др.;
5) выдача данных по решаемым задачам в реальном и квазиреальном времени.
В реальном времени на борту КА планируется решать задачи 1,2 и 3, задача 4 будет пока решаться на Земле.
Аппаратный комплекс координатно-временного обеспечения (ККВО), решающий на борту задачи 1,2 и 3, а также формирующий для передачи на землю данных об элементах внешнего ориентирования материалов съемок включает три автономные системы – навигационную систему, звездный координатор и процессор координатной привязки.
В навигационную систему входит приемник Аппаратуры спутниковой навигации – АСН. С выхода АСН с дискретностью в 1 сек в реальном времени будут поступать следующие данные:
– звездное Гринвичское время,
– географические координаты
X,Y,Z центра масс КА,– скорости изменения географических координат
Звездный координатор (ЗК) включает два блока определения координат звезд БОКЗ-М и основание, на котором они установлены. Оба БОКЗ-М работают синхронно и позволяют определять с дискретностью в ~ 3 сек трехосную ориентацию ЗК в инерциальной системе координат, реализуемой бортовым звездным каталогом. В штатном режиме такая ориентация определяется, примерно, с равной точностью по всем трем осям.
Процессор координатной привязки (ПКП) обеспечивает решение нижеперечисленных задач.
1. Управление работой комплекса.
2. Выдачу в систему управления КА секундных меток с их привязкой к Гринвичскому времени.
3. Расчет в заданные моменты времени инерциальной ориентации ЗК.
4. Выдачу для передачи на землю данных, поступающих от АСН, и элементов ориентации ЗК, привязанных к Гринвичскому времени.
5. Выдача в систему управления КА с заданной временной дискретностью данных орбитальной ориентации КА.
Последние вместе с данными от датчиков угловых скоростей позволят в реальном времени управлять ориентацией и стабилизацией КА.
Блок-схема алгоритма определения орбитальной ориентации КА приведена
на рис.1.
При съемке земной поверхности, в зависимости от области применения, географическая координатная привязка изображений предусматривает решение одной из трех нижеперечисленных задач:
– определение географических координат проекции выбранной точки изображения на земную поверхность;
– нанесение на исходное изображение координатной сетки;
– трансформирование или преобразование изображения в заданные картографическую проекцию и масштаб.
Первая задача возникает, когда требуется найти реальное местоположение объектов, выделенных на полученных изображениях при их тематической обработке. Нанесение координатной сетки параллелей и меридианов необходимо для визуального анализа данных ДЗЗ, особенно при отсутствии на изображениях
легкоразличимых и опознаваемых деталей ландшафта. Преобразование изображений в заданную проекцию необходимо: для построения на их основе различных карт, при совместном анализе равновременных видеоданных, при интеграции результатов ДЗЗ в географические информационные системы.Алгоритмы решения каждой из перечисленных задач координатной привязки видеоданных, получаемых строчными сканирующими системами, представлены
на рис.2-4.
Наиболее простым является алгоритм решения первой задачи, включенный с незначительными вариациями в состав остальных алгоритмов.
Исходной информацией для данного алгоритма служат координаты выбранной точки на исходном изображении.
Отсутствие точных измерений местоположения и ориентации КА на момент съемки каждой строки изображения вызывает необходимость оценки этих параметров путем интерполяции по нескольким соседним измерениям. Интерполяция осуществляется с использованием моделей орбитального и углового движения КА. Полученные оценки координат КА принимаются в качестве линейных элементов внешнего ориентирования.
Перевод параметров инерциальной ориентации в геоцентрическую систему координат осуществляется путем умножения на матрицу, элементы которой являются тригонометрическими функциями, определяемыми звездным Гринвичским временем съемки строки. Угловые элементы внешнего ориентирования, описывающие ориентацию съемочного устройства в момент съемки строки, определяются с использованием информации о взаимной ориентации съемочного устройства и звездного координатора. Элементы этой ориентации
определяются при предполетной калибровке аппаратуры, установленной на КА, а также периодически уточняются при летных калибровках. Расчет параметров линии визирования точки земной поверхности на изображении осуществляется с использованием найденных элементов внешнего ориентирования и информации о геометрических характеристиках съемочной камеры. На этом шаге алгоритма могут использоваться результаты наземной геометрической калибровки камеры.
Блок-схема алгоритма определения орбитальной ориентации КА
Рис.1.
Условные обозначения :
СК-система координат; СК ЗК - система координат звездного координатора (внутренняя); ИСК – инерциальная система координат; ГСК – геоцентрическая система координат; ОСК – орбитальная система координат; КА – космический аппарат.
Искомые географические координаты изобразившейся точки земной поверхности вычисляются путем поиска точки пересечения линии визирования и эллипсоида, принятого в качестве приближенной модели Земли.
На последнем этапе алгоритма производится уточнение географических координат изобразившейся точки с учетом цифровой модели местности.
При нанесении координатной сетки расчет географических координат производится для центров всех элементов исходного изображения. Результатом обработки является исходное изображение, отдельные элементы которого, попадающие на линии меридианов и параллелей, окрашиваются заданным цветом.
Алгоритм трансформирования изображения в заданные проекцию и масштаб
является наиболее сложным и трудоемким.Рассмотренные алгоритмы позволяют достаточно оперативно и с высокой точностью решать задачи географической координатной привязки видеоданных ДЗЗ, получаемых космическими строчными телевизионными системами и сопровождаемых дополнительной информацией об элементах внешнего ориентирования, рассчитываемых по данным навигационных измерений.
Финансирование по теме в 2003 году составило 0,77 млн.руб. вместо запланированных 4 млн.руб., что не позволило осуществить натурное моделирование решения задачи.
Тема ИНТЕЛЛЕКТ
. Разработка телекоммуникационных технологий и информационное обеспечение космических экспериментов. Научный руководитель д.т.н. Р.Р. Назиров
1. Разработка информационно-телекоммуникационных технологий обеспечения совместной научной деятельности взаимоудаленных научных коллективов в форме виртуального научного семинара
Выполнялись работы по созданию базы данных виртуального семинара. На сервере семинара установлено программное обеспечение СУБД
MySQL. Установлены новые версии программного обеспечения веб-сервера семинара и сервера потокового вещания. Разработана структура базы данных, включающая в себя название доклада, авторов, дату проведения или выставления материалов, место проведения семинара, краткое содержание (абстракт), ключевые слова, ссылки на материалы (файлы презентации, аудио/видео материалы). Предусматривается возможность поиска по содержимому полей. Проводилась разработка прикладных программ, позволяющих автоматизировать процесс заполнения базы данных материалами проведенных семинаров. Научный руководитель работ: Шевченко М.И.. тел. 333-14-88 ms@space.ru2. Создание математически обоснованной архитектуры системы автоматизированного распределенного интерактивного ресурса по анализу, визуализации и распространению данных сетевого трафика.
Предложена масштабируемая функциональная схема подсистемы сбора и обработки первичных статистических данных сетевого трафика.
Рассмотрены технологии индексирования многомерных пространственных данных (деревья
K-D-Tree, R-tree) и аспекты их реализации на существующих платформах управления реляционными СУБД (ORACLE, INFORMIX, MySQL, PostgreSQL).Исследованы вопросы применимости существующих методов кластеризации данных (
K-Mean, STING, WaveCluster, DBSCAN) к задачам обработки сетевой статистики.Разработан специальный метод для кластеризации многомерных данных с иерархически организованными компонентами размерностей. Метод обладает низкими вычислительными затратами, возможностью инкрементативного обновления дерева кластеров и может успешно применятся для кластеризации данных сетевого трафика в режиме реального времени. Данный метод был эмпирически исследован с точки зрения целевой функции “Пространственное разрешение / Объем данных”. На рисунке показаны сравнительные результаты разработанного метода и традиционных методов агрегирования. Испытания проводились на тестовом блоке статистики
NetFlow, полученном с международного канала RbNet-Telia. По приведенным графикам можно наблюдать выигрыш целевой функции до двух порядков нового метода на фоне традиционных методов агрегирования данных.Работа проводилась при частичной поддержке РФФИ, грант 02-07-90390.
Коноплев В.В, Захаров Д.Ю., Боярский М.Н., Назиров Р.Р. “
Ntmtools: инструментальный набор для эффективного сбора данных сетевого трафика” // Тезисы конф. Методы и средства обработки информации, Москва, 2003.
3. Разработка макета информационной системы автоматизации научно-организационной деятельности Института.
Опыт, накопленный при создании систем, обеспечивающих сбор, обработку, хранение и визуализацию данных, позволяет не только создавать информационные системы, обеспечивающие работу с результатами научных измерений, но и разрабатывать средства, предназначенные для автоматизации научно-организационной деятельности Института
. Так, в настоящее время проводится отработка макета системы, реализующей единую информационную среду для выполнения всех основных процедур научно-организационного характера. Система предназначена для автоматизированного ведения планов и отчетов Института, проведения внутриинститутских конкурсов и решения других типичных для академических институтов задач.Для проведения детального учета система связана с базами данных административных подразделений, а для информирования научной общественности об основных работах Института имеет выход в Интернет.
Научный руководитель работ: Назаров В.Н. тел. 333-40-13
vnazarov@romance.iki.rssi.ru4. Исследование характеристик современных систем информационного обеспечения научных космических проектов, анализ и разработка концепции их построения для использования в перспективных исследованиях.
Бурное развитие информационных и телекоммуникационных средств позволяет использовать опыт, накопленный в смежных областях, при создании систем информационного обеспечения космических проектов. С этой целью была разработана концепция построения информационных систем научных космических проектов. Основным мотивом построения этой концепции является унификация информационных интерфейсов систем научных космических проектов с международными информационными стандартами. Такой подход позволяет не только сократить сроки разработки системы и увеличить её функциональные возможности, но и снизить затраты на её создание и сопровождение на всех стадиях проекта, начиная от наземных испытаний и заканчивая полётом и послеполетным анализом данных, за счет использования готовых стандартных решений и средств. Эта концепция легла в основу разработки систем информационного обеспечения перспективных научных космических проектов, проводимой в настоящее время.
Научный руководитель работ: Назаров В.Н. тел. 333-40-13 vnazarov@romance.iki.rssi.ru
5. Разработка многопользовательской программной системы сетевой информационной поддержки космических проектов для планирования и проведения научных исследований.
Проводился анализ существующих проектно-ориентированных систем поддержки космических экспериментов. Определена структура базы данных и форматы представления данных, а также достаточный ряд генерируемых параметров. Выработан алгоритм добавления различных данных при возможной адаптации системы к конкретному космическому проекту.
Научный руководитель работ: Хавенсон Н.Г. тел. 333-50-45
xaba@hea.iki.rssi.ru6. Разработка концепции информационной системы открытого доступа для поиска зависимостей между разнородными параметрами научных космических измерений
Международным научным сообществом накоплен огромный объём данных, полученных при проведении космических проектов. Однако анализ этих данных и поиск взаимосвязей между ними существенно осложняется таким фактором, как отсутствие удобных и независимых от компьютерной платформы способов доступа к данным и их представлениям. С целью решения этой проблемы в Институте была разработана концепция и на её основе создан макет системы, использующей платформонезависимые web-технологии и методы.
Другими факторами, затрудняющим поиск взаимосвязей между результатами полученными в различных космических экспериментах, наземных измерений и модельных расчетов являются децентрализация и разнородность форматов хранения этих данных. Интеграция такой информации в единую базу данных, предоставляющую эффективные средства поиска и взаимного анализа данных, при традиционном подходе, требует от специалистов в области фундаментальных направлений исследований глубокого знания современных компьютерных средств, с одной стороны, и разработки уникального программного обеспечения для каждой конкретной задачи, с другой стороны. С целью унификации и упрощения этой процедуры была разработана соответствующая технология и создана её программная реализация. Суть этой технологии (FDSDB – File Driven Scientific Data Base) сводится к построению взаимного отображения структур реляционной базы данных и стандартной файловой системы. При этом с помощью файловой системы можно не только заносить или обновлять информацию в базе данных, но также модифицировать её структуру, управлять привилегиями доступа к данным и т.п.
Следует отметить, что использование результатов перечисленных работ позволило не только упростить (и, соответственно, удешевить) процесс создания информационных систем для фундаментальных исследований, но и, за счет стандартизации информационных интерфейсов, позволило использовать в этих системах целый спектр программных компонент и комплексов, предназначенных для взаимного анализа данных. Так, для поиска “нечетких” зависимостей между разнородными данными была создана система на основе методов искусственного интеллекта. Результаты, полученные с её помощью, были подтверждены “классическими” методами. В настоящее время ведутся работы по усовершенствованию этой системы.
Научный руководитель работ: Назаров В.Н. тел. 333-40-13 vnazarov@romance.iki.rssi.ru
7. Разработка концепции и архитектуры пиринговой информационной системы дистанционного мониторинга лесных пожаров и управления связанных с ними риском здоровью населения (далее для краткости просто информационной системы).
Разработана концепция и архитектура пиринговой информационной системы дистанционного мониторинга лесных пожаров и управления связанных с ними риском здоровью населения (далее для краткости просто информационной системы).
Цель разработки состоит в том, чтобы объединить возможности легкого доступа через сеть Internet широким слоям населения к информации о состоянии окружающей среды и, в частности, воздуха, находящегося под воздействием дымов лесных пожаров, с потенциалом пиринговых сетей и экспертных знаний специалистов в области экологической эпидемиологии.
Продуктом разработки станет прототип информационной системы, формирующей цепь обратной связи между организационными структурами, обеспечивающими получение и тематическую обработку данных дистанционного зондирования Земли о лесных пожарах в заданном регионе, и индивидуальными пользователями, которых интересует степень опасности для их здоровья, вызываемая загрязнением воздуха дымом.
Это откроет пользователям такой информационной системы путь к самостоятельному управлению качеством своей жизни, посредством использования современных достижений науки и передовых информационных технологий. Пользователь, имеющий доступ в Internet, получит возможность не только получать информацию о степени текущей опасности для его здоровья, вызванной дымом лесных пожаров, но и перспективный прогноз, а также конкретные рекомендации к своим дальнейшим действиям, направленным на устранение или снижение уровня этой опасности (отъезд из региона, принятие лекарств и т.п.).
Алгоритм работы информационной системы и ее архитектура представлены на рисунке.
Руководитель работ – канд. техн. наук В.В.Егоров, тел. 333-3589,
egorov@iki.rssi.ru8. Разработка концепции природных и информационных циклов в задаче мониторинга и управления глобальными экологическими процессами.
Природные циклы вещества и энергии (углеродный, гидрологический, геохимический, радиационный баланс Земли) в последние столетия становятся все менее замкнутыми, что связано с антропогенным воздействием на окружающую среду. Это грозит возникновением глобальной экологической катастрофы на Земле. Для обеспечения их замкнутости предлагается подключить к ним цикл мониторинга и управления, основанный на использовании информационных систем аэрокосмического дистанционного зондирования и применении полученных данных о состоянии биосферы для управления последней и природными циклами. С этой целью разработана имитационная модель информационного цикла мониторинга и управления “Геодиалог” (см. рисунок).
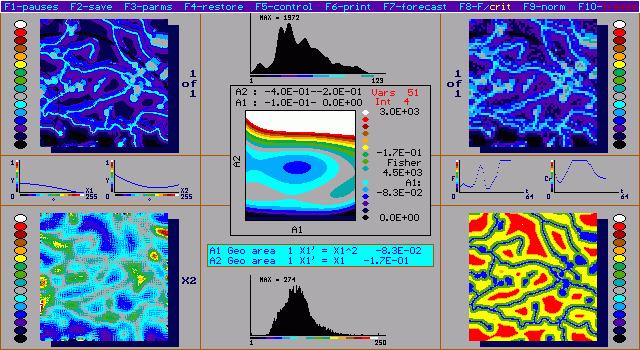
На рисунке показан главный экран программы "Геодиалог", иллюстрирующий использование замкнутого цикла мониторинга и управления.
Внизу слева: цветокодированная карта пространственного распределения параметров состояния зондируемой территории А1 и А2; кривые слева: спектральный отклик в зависимости от значений параметров состояния; вверху слева: поля яркости, соответствующее спектральному отклику; верхняя кривая: гистограмма значений поля яркости; вверху справа: карта оценок параметров состояния зондируемой территории; кривые справа: расчетные значения информации Фишера и значений критерия управления; внизу справа: карта целевого управления; кривая внизу: гистограмма значений параметров состояния; центральное окно показывает двумерную гистограмму как результат процедуры оптимизации процедуры мониторинга.Руководитель работ – канд. техн. наук В.В.Егоров, тел. 333-3589,
egorov@iki.rssi.ru9. Создана концепция информационной системы, разработана ее вычислительная архитектура, проведен сбор образцов имеющихся баз данных.
Цель разработки состоит в обеспечении органов администрации городов, региональных и городских управлений Минприроды РФ и Госсанэпиднадзора, а также директоров крупных промышленных предприятий, работа которых спряжена с выбросами вредных веществ в атмосферный воздух.
Продуктом разработки будет информационная система обработки данных экологического мониторинга состояния воздушного бассейна в городах (ИСОДЭМ), предназначенная для оценки риска здоровью населения, связанного с загрязнением воздуха.
ИСОДЭМ состоит из последовательно расположенных модулей, по одному для каждого типа данных (см. рисунок).
Среди них можно выделить те, что рассчитывают: объемы выбросов загрязняющих веществ, их концентрации, значения рисков, уровни дополнительной заболеваемости и смертности. Полная структура ИСОДЭМ будет дополнительно включать также модули для индексов потерь здоровья, соответствующих экономических потерь, расчета критериев стоимость
/ эффективность, выбора мер управления, плана реализации выбранных мер управления, параметров тех технологических процессов, которые ведут к выбросу загрязняющего вещества.Базовый, идущий по умолчанию процесс обработки данных состоит в обмене информацией между модулями. Обычно данные проходят через модули последовательно (например, от выброса к концентрациям загрязняющего вещества через модель дисперсии; от концентраций к риску через модель экспозиции, и т.д.). Внутри модуля модельные вычисления согласовываются с реальными измерениями из баз данных, связанных с модулем, и затем результаты передаются далее. В полном варианте ИСОДЭМ этот процесс доходит до модуля выбора мер управления выбросами и затем начинается с новыми выбросами. Таким образом, цикл замыкается и повторяется до тех пор, пока не достигнуто устойчивое состояние плана управления и соответствующего ему развития управляемой опасности.
Руководитель работ – канд. техн. наук В.В.Егоров, тел. 333-3589,
egorov@iki.rssi.ru
10. Выполнялась разработка методики построения архивов и исследование характеристик носителей информации с целью обеспечения неограниченного срока хранения научной информации.
С этой целью на серверах архива было установлено программное обеспечение, обеспечивающее синхронизацию содержимого файловых архивов больших объемов. Исследовались характеристики новых аппаратных средств хранения информации, обеспечивающих прямой доступ к большим объемам данных и сочетающих повышенную надежность хранения информации с относительно невысокой удельной стоимостью хранения. Для этого был установлен сервер с аппаратной реализацией RAID-5 на 6 IDE-дисках эффективной емкостью 800 Мбайт и проведены исследования работы системы под большими нагрузками, показавшие достаточную надежность выбранной конфигурации программно-аппаратного обеспечения. Также проводилась контрольная проверка сохранности информации на магнитных лентах.
Архив данных завершенных проектов в настоящее время состоит из более чем 4500 сеансов данных 8 проектов, имеет объем данных более 25 GВ и обеспечивает открытый доступ к архивным данным пользователям локальной сети ИКИ, а также удаленным пользователям по сети Internet. Удаленный доступ обеспечивается использованием интерфейса WWW.
Обеспечено функционирование и развитие аппаратной и программной частей Архива данных. Установлены обновления системного программного обеспечения и прикладных программ, повышающие эффективность функционирования Архива. Была продолжена перепись данных Архива на высокоплотные магнитные ленты стандарта DDS-3, а также пополнение Архива за счет перезаписи на новые носители данных проекта Интеркосмос - Болгария 1300, переобработанных данных по проекту Интербол, а также данных спутникового мониторинга Земли. Проводилась контрольная проверка сохранности информации на магнитных лентах. Для повышения скорости доступа к серверу архива произведен перевод локальной сети архива на 100-Мбит ethernet.
Название проекта |
Объем данных, Мб |
Количество сеансов |
Активный |
3926 |
682 |
Аркад |
17500 |
2476 |
Апекс |
768 |
119 |
Интеркосмос-Болгария 1300 |
1440 |
221 |
Прогноз 7 |
200 |
193 |
Прогноз 8 |
2100 |
1323 |
Прогноз 9 |
45 |
63 |
Прогноз 10 |
365 |
74 |
Табл.1. Содержание научного Архива данных завершенных проектов
Основную часть Архива научных данных космических проектов ИКИ РАН составляет Архив данных проекта ИНТЕРБОЛ. Он содержит более 316 гигабайт научных данных проекта ИНТЕРБОЛ; из них в открытом доступе находятся более 1,2 гигабайта данных ключевых физических параметров. Архивная система обеспечивает автоматический прием, сохранность и распределение информации для сотен пользователей из десятков организаций 12 стран мира. В открытом доступе, осуществляемом через WWW-сервер проекта ИНТЕРБОЛ (http://www.iki.rssi.ru/interball), находятся орбитальная информация, данные ориентации и ключевые физические параметры.
Содержание научного Архива данных проекта ИНТЕРБОЛ представлено в табл.2:
|
Авроральный Зонд |
Хвостовой Зонд |
|||
|
"Сырые данные" |
20 Гб |
"Сырые данные" |
74 Гб |
|
|
Экспресс-анализ |
22.5 Гб |
Экспресс-анализ |
59 Гб |
|
|
Обработанные данные |
24.5 Гб |
Обработанные данные |
76 Гб |
|
|
СТО |
15.5 Гб |
Магион 4,5 |
25 Гб |
|
|
ВСЕГО: 316,5 Гб |
||||
Табл.2 Содержание научного Архива данных проекта ИНТЕРБОЛ.
11. Проведены работы по проекту Болгария-1300 по переработке данных с магнитных лент ЕС на современные носители в форматах, подготовленных для записи в архив.
Данные проекта переписываются со старых магнитных лент ЕС на современные носители, расшифровываются с устранением сбоев, перерабатываются в форматы, необходимые для архивирования и передаются в архив. Из 137 сеансов, переписанных со старых лент, передано в архив 97 сеансов.
Научный руководитель работ: Шевченко М.И.. тел. 333-14-88 ms@space.ru
12. Проведены работы переработке данных проектов “Венера 13,14” и “Вега” в форматы, подготовленные для записи в архив.
Переписаны со старых магнитных лент данные перелетных сеансов, данные спускаемых аппаратов и данные пролетных сеансов.
При создании форматов данных для архива были выявлены следующие проблемы:
- пропуски в данных из-за ошибок при считывании магнитных лент;
- наличие шумов и структурных сбоев, а для Венеры – 13, 14 повторы данных, связанные с перемоткой бортового запоминающего устройства во время сеанса воспроизведения. Это потребовало отыскать отсутствующие участки данных и “закрыть” пропуски, осуществить очистку информации от сбоев, восстановить структуру данных, организовать повторные считывания плохих магнитных лент, применяя новые алгоритмы обработки данных в буфере ввода, а для Венеры – 13,14 локализовать повторы и “вырезать” их.
По проекту Вега выполнено 70% работы по созданию архива, по проекту Венера –13,14 50%.Ввод оставшейся информации со старых магнитных лент будет осуществлен до конца 2003 года
Научный руководитель работ: Шевченко М.И.. тел. 333-14-88 ms@space.ru
13. Проведены работы по дешифрация данных, устранению сбоев, формированию выходных форматов приборов
IMAP-3М, IESP-2 для создания архива магнитных измерений и потенциала спутника в проекте Интербол-Авроральный зонд.Для эксперимента ИМНП-ЗМ, измеряющего магнитное поле на Авроральном Зонде (АЗ), были выполнены следующие работы:
Для эксперимента ИЕСП-2, измеряющего электрические и магнитные поля и их флуктуации на Авроральном Зонде, были выполнены следующие работы:
Научный руководитель работ: Шевченко М.И.. тел. 333-14-88
ms@space.ru14. Разработка автоматической платформы для высокоточной стыковки в воздушной и подводной средах.
Для устройств управления наведением, использующих системы “технического зрения” на ПЗС – матрицах для целей распознавания “объектов наблюдения” на фоне разнообразных по своей природе помех (в заатмосферной астрономии – выделение малых движущихся объектов на фоне “неподвижных” звезд, в наземной инфракрасной астрономии – выделение “теплых” объектов на фоне шумов атмосферы, в подводных наблюдениях – выделение специальных маркеров на фоне мути и взвесей) разработаны:
Макет программного обеспечения подсистемы предварительной обработки информации, поступающей от ТВ- датчика.
Были проведены работы по исследованию алгоритмов фильтрации видеоизображений. Основными требованиями к алгоритму фильтрации были:
В связи с этим за основу фильтра был принят алгоритм арифметического сложения / усреднения.
Для проверки применимости предложенного алгоритма были написаны программы обработки видеоизображений под операционные системы MS Windows и GNU/Linux. Программы написаны для работы с видеокартами захвата изображения основанных на чипах bt848 и bt878. Использование подобных видеокарт позволяет использовать в качестве источников видеосигнала как телевизионные программы так и сигнал с реальной ПЗС - матрицы.
Исследования показали, что применение алгоритма арифметического сложения/усреднения уменьшает цветной шум изображения с одновременным увеличением контрастности статического изображения как для ТВ - сигнала, так и для сигнала ПЗС - матрицы.
Макет аппаратной обработки (усреднения) информации, поступающей от ТВ-датчика.
Разрабатываемое устройство накопления и усреднения кадров должно выполнять следующие основные функции: суммировать по пикселям кадры (например, размером 128
x128 пикселей) согласно заранее установленному коэффициенту накопления, и усреднять накопленные суммы по каждому пикселю отдельно.Руководители: к.т.н. О.М. Клишев 333-23-56, С.А. Ауст, тел.333-11-88
aust@iki.rssi.ruРазработка средств сжатия изображений для систем дистанционного зондирования и проекта ФОБОС-ГРУНТ.
Разрабатываемые специализированные методики сжатия изображений без потерь (lossless) и с ограниченными потерями (near lossless), когда ошибка восстановления гарантированно не превышает заданной величины, позволяют получить относительно большие степени сжатия изображений при весьма низкой ресурсоёмкости, обеспечивая высокую скорость работы соответствующих программных реализаций, что делает возможным их применение в бортовой аппаратуре.
При обработке спектрозональных изображений полученные достижения можно суммировать следующим образом: была разработана схема кодирования, основанная на адаптивных принципах наблюдения статистики, ориентированная на реализацию на простейшем DSP или на аппаратную реализацию в заказном чипе.
В таблице 1 приведены результаты работы экспериментальной программы сжатия без потерь LLC 0.6, реализующей разработанную методику сжатия, на тестовом наборе изображений (чёрно-белые полутоновые, 8 бит на пиксел) в сравнении с известными аналогами: CALIC, JPEG-LS, JPEG2000 (LuraWave SmartCompress 3.0) в режиме сжатия без потерь, а также неспециализированным кодером WinRAR (использовалась версия 3
.0).|
Изображение |
Размеры (WxH) |
LLC 0.6 |
CALIC |
JPEG-LS |
JPEG 2000 lossless |
WinRAR 3.0 |
|
airfield.bmp |
512x512 |
4.981 |
5.475 |
5.566 |
5.858 |
6.195 |
|
bridge.bmp |
512x512 |
3.505 |
5.375 |
5.500 |
5.760 |
4.386 |
|
couple.bmp |
512x512 |
4.225 |
4.596 |
4.677 |
4.863 |
5.368 |
|
harbour.bmp |
512x512 |
4.449 |
4.458 |
4.494 |
4.797 |
5.219 |
|
lena.bmp |
512x512 |
4.087 |
4.121 |
4.237 |
4.330 |
5.135 |
|
man.bmp |
512x512 |
4.354 |
4.385 |
4.505 |
4.716 |
5.370 |
|
mandrill.bmp |
512x512 |
5.901 |
5.899 |
6.038 |
6.130 |
6.633 |
|
peppers.bmp |
512x512 |
4.184 |
4.209 |
4.289 |
4.436 |
5.456 |
|
sailboat.bmp |
512x512 |
4.680 |
4.695 |
4.769 |
4.955 |
5.543 |
|
woman1.bmp |
512x512 |
3.981 |
4.555 |
4.672 |
4.837 |
5.552 |
|
woman2.bmp |
512x512 |
3.157 |
3.202 |
3.300 |
3.339 |
4.052 |
|
balloon.bmp |
720x576 |
2.841 |
2.838 |
2.904 |
3.056 |
3.793 |
|
board.bmp |
720x576 |
3.551 |
3.579 |
3.675 |
3.800 |
4.710 |
|
girl.bmp |
720x576 |
3.785 |
3.788 |
3.925 |
4.083 |
4.996 |
|
gold.bmp |
720x576 |
4.404 |
4.406 |
4.477 |
4.626 |
5.087 |
|
Итого(bpp): |
- |
4.073 |
4.275 |
4.371 |
4.539 |
5.097 |
Таблица 1.
Экспериментальные данные представлены средним числом бит на пиксел для каждого изображения (лучшие результаты выделены жирным шрифтом). Результаты сжатия в режиме near lossless в таблице отсутствуют, поскольку, с одной стороны, не все представленные кодеры этот режим поддерживают, с другой – каждый из поддерживающих его в режиме
error=1 (ошибка при восстановлении по абсолютной величине не превышает 1) обеспечивает коэффициент сжатия приблизительно в 1.6 раза больший, чем в режиме lossless, а в режиме error=2 коэффициент сжатия увеличивается в 2 раза (также по сравнению с lossless).В таблице 2 приведены результаты сжатия (среднее число бит на пиксел сжатого изображения) серии космических изображений, полученных при съёмке одного и того же участка земной поверхности в различных участках спектра. Каждое изображения представлено в виде PGM-файла 6967х5965 пикселов, 8 бит
на пиксел (41558155 байтов).Изображения сжимались в режимах без потерь (столбец lossless), с ограниченными потерями, не превышающими по абсолютной величине 1 (error=1) и с потерями, не превышающими по абсолютной величине 2 (error=2).
|
lossless, bpp |
error=1, bpp |
error=2, bpp |
|
|
Band 1 |
3.571 |
2.211 |
1.709 |
|
Band 2 |
3.025 |
1.798 |
1.431 |
|
Band 3 |
3.728 |
2.372 |
1.850 |
|
Band 4 |
3.497 |
2.178 |
1.704 |
|
Band 5 |
4.252 |
2.847 |
2.263 |
|
Band 6 |
3.727 |
2.360 |
1.836 |
|
Среднее |
3.634 |
2.294 |
1.799 |
Таблица 2.
Научный руководитель к.т.н. В.Ф. Бабкин, тел.333-23-56,
vbabkin@iki.rssi.ruПубликации по данной работе:
В.Ф.Бабкин, И.М.Книжный, К.Е.Хрекин. “Сжатие без потерь и с малыми потерями полутоновых изображений”. Представлено в качестве доклада на 11-ю Всероссийскую конференцию “Математические методы распознавания образов”, 2003 г.
В.Ф.Бабкин, И.М.Книжный, К.Е.Хрекин. “Сжатие без потерь и с малыми потерями многоспектральных изображений”. Представлено в качестве доклада на Всероссийскую конференцию “Современные проблемы дистанционного зондирования
Тема КОСМОС
. Модернизация и развитие научной космической сети “КОСМОС” на базе технологии Gigabit Ethernet. Научный руководитель д.т.н. Р.Р. НазировПроизведена смена дизайна и русификация WWW сервера ИКИ.
Обеспечено обновление информации на WWW сервере института, включая освещение проведения конференции Хенд-2003, международной конференции "Теория плазмы, космические исследования и международное сотрудничество: взгляд в будущее", всероссийской конференции “Современные проблемы дистанционного зондирования Земли из космоса”, ежемесячных семинаров по механике, управлению, информатике и по спутниковым методам и системам исследования Земли, включая выездной семинар “Современные и перспективные разработки и технологии в космическом приборостроении”. Разработан Web-сервер программы ОФН-16 “Солнечный ветер: генерация и взаимодействие с Землей и другими планетами”. В связи с изменением нумерации отделов произведена модернизация базы данных Whois о сотрудниках института.
Обеспечено функционирование и развитие аппаратной и программной частей серверов телематических служб института, включая почтовый сервер,
Web-сервер, серверов службы доменных имен (DNS), News-сервер, FTP-сервер. В связи с выходом из строя жесткого диска Web-сервера института произведена переустановка программного обеспечения сервера с переводом его на новую версию системного ПО (Linux kernel ver. 2.4).Проводились работы по тестированию и установке программ-фильтров нежелательной электронной почты (спама) на почтовом сервере института и в почтовых программах-клиентах.
Проводились работы по обеспечению доступа сотрудников ИКИ РАН к публикациям эектронных издательств
Springer, Academic Press, Institute Of Physics, Physical Review, а также к публикациям научной электронной библиотеки elibrary.ruПроводились работы по обеспечению безопасности функционирования системного программного обеспечения серверов и клиентов архива данных, серверов телематических служб института и локальной сети отдела.