2.5. Фундаментальные и прикладные научные исследования в области механики,
систем управления и информатики
Тема УПРАВЛЕНИЕ Исследования в области динамики сложных механических
систем, проектирования орбит и построения математических моделей планирования космических
экспериментов
Гос. регистрация
№ 01.20.03 03442
Научный руководитель
д.т.н. Р.Р. Назиров
1. Исследование
изоморфизма эволюционно зрелых суперэлитных плазменных колец, орбит планетарных
и спутниковых систем и орбит электронов
в Боровской модели атома водорода. Анализ динамики вращающихся КА с
МГД-элементом в контуре управления пространственным положением вращающихся КА
нового поколения.
Доказано,
что наблюдаемые сейчас кольца больших планет являются реликтами протоколец,
состоявших из замагниченной плазмы. При этом использовано решение модельной
задачи, основным результатом которого является механизм стратификации
эволюционно зрелого плазменного пракольца на большое количество узких элитных
колец, разделенных «антикольцами» (щелями).
Теоретически обосновано
наличие в околопланетном пространстве
области существования и устойчивости плазменных колец (ES-область). В целях проверки модели,
лежащей в основе полученных решений, была использована информация, полученная в
ходе реализации миссий Voyager,
Galileo и Cassini..
Соответствующие
результаты обобщены на протокольцо, состоящее из замагниченной плазмы,
плотность которой убывает в радиальном направлении. Доказано квантование секториальных и
орбитальных скоростей, радиусов и периодов вращения суперэлитных плазменных
колец и их изоморфизм с орбитами планет Солнечной системы и спутников. Этот
изоморфизм распространяется также на орбиты электронов в модели Бора атома
водорода.
Проведен анализ динамики вращающегося КА с
полостями, частично заполненными жидкостью при наличии МГД-элемента в контуре управления
пространственным положением КА. Показано, что этот элемент открывает
принципиальную возможность создания бесшарнирных систем стабилизации и
ориентации, не требующих затрат рабочего тела.
Рассмотрено применение МГД-элемента для
стабилизации в режиме раскрутки КА, не
обладающего гироскопической устойчивостью. Построены области устойчивости в
плоскости параметров КА и закона управления. Проведено математическое моделирование
возмущенного движения КА с пассивным и активным МГД-элементом.
Сформулирована проблема использования энергии
неоднородного импульсного магнитного поля для ускорения струи ионизированного
газа (холодной плазмы).
По
результатам работы сделан доклад на семинаре в ИКИ, опубликованы 4 статьи в
журнале «Космические исследования».
г.н.с. д.ф.-м.н. Б.И. Рабинович, тел.
333-50-45
2.
– 3. Исследования динамики полета и
управления космических аппаратов с солнечным парусом с изменяемой отражательной
способностью. Разработка концепций и алгоритмов
управления группировками космических аппаратов при построении и поддержании
заданной конфигурации группировок путем использования солнечного паруса с
изменяемыми отражательными характеристиками. Разработка способов управления
движения космических приборов, состоящих из элементов, размещаемых на
нескольких аппаратах.
Разработана модель управления движением
группировки космических аппаратов в предположении, что задачей управления
является сохранение заданного взаимного положения аппаратов. В частности,
рассмотрена проблема удержания направления детектор-зеркало для проектов двухаппаратной
реализации космических телескопов с большим фокусным расстоянием.
Продолжены исследования по использованию
солнечного паруса для решения задач управления и маневров космических
аппаратов. Показана применимость этих технологий для малых космических
аппаратов в составе группировок.
Перечисленные
результаты работы были представлены в виде опубликованных 3х докладов на 7-ой международном симпозиуме по
снижению стоимости наземных систем обеспечения полетов и управления
космическими аппаратами (RCSGSO) и на семинаре по механике и управлению
в ИКИ РАН.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
4. Разработка методов управления ориентацией малых
космических аппаратов с минимальным составом измерительных и исполнительных
элементов, предназначенных для околоземных и межпланетных полетов. Разработка
методов управления малыми космическими аппаратами, использующими двигатели
малой тяги для решения задач перехода на высокие околоземные орбиты и в
межпланетных миссиях, в том числе построение алгоритмов управления ориентацией.
Исследованы алгоритмы управления ориентацией
космических аппаратов с электрореактивными двигателями для задач перелета к
планетам при старте с низкой околоземной орбиты. Определены требования к
системам управления этих аппаратов и предложены оптимальные сценарии и концепции
реализации их разгона на перелетные траектории.
Исследованы возможности доставки свербольших
объемов информации на Землю при
выполнении проектов исследования планет путем применения наноаппаратов, несущих
эту информацию. Показана техническая реализуемость предложенной концепции.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
5. Разработка алгоритмов управления сложными
системами в условиях неопределенности. Исследование нестационарных процессов в
динамических системах при случайных возмущениях
Исследованы переходы
между различными положениями равновесия в системе со слабым периодическим
возмущением. Ранее предполагалось, что переходы носят хаотический характер, и
связаны с эффектом стохастического резонанса. Доказано, что переходы связаны с
возникновением субгармонических колебаний большой амплитуды; «размывание» спектра, характерное для хаотических
колебаний, связано с разрушением сепаратрисы субгармонического резонанса, и не
имеет отношения к стохастическому резонансу.
Продолжено исследование
нестационарных процессов в динамических системах со слабыми случайными
возмущениями. Построена
асимптотическая оценка среднего времени и вероятности выхода из области для
механических систем, заданных уравнениями Лагранжа. Показано, что
асимптотическая оценка среднего времени пребывания в области может быть
получена в явном виде как сумма двух слагаемых, зависящих от кинетической и
потенциальной энергии, соответственно.
Перечисленные результаты были опубликованы в журналах Physical Review E, IEEE Transactions of Automatic Control и доложены на конференциях Dynamics of Systems with Long-Range Interactions (invited paper), Assisi, Italy, 3-8 July, 2007
и Workshop on Random Dynamical Systems (invited paper), Bielefeld, Germany, 30 Nov -1 Dec, 2007.
в.н.с.,
д.ф.-м.н. А. С. Ковалева, a.kovaleva@ru.net
6.
-7. Дальнейшее изучение совместного влияния несферичности центрального тела и
гравитационных возмущений со стороны внешних тел на эволюцию орбит и время
существования спутников. Дальнейшее исследование влияния прецессии
плоскости орбиты Луны на эволюцию орбит и время существования ИСЗ нового
поколения.
Исследование эволюции орбит спутников планет
под влиянием гравитационных возмущений от третьего тела позволило сформулировать
и доказать теоремы об условиях соударения спутника с центральным телом.
Для описания эволюции орбит была использована
интегрируемая система эволюционных уравнений, полученная М.Л. Лидовым в 1961
году путем двукратного осреднения возмущающей функции. В работе 1961 года М.Л
Лидов сформулировал критерий соударения спутника с центральным телом, и
показал, что при наклонениях орбиты спутника к плоскости орбиты возмущающего
тела, равных 90° (или близких к этому значению), соударение спутника с центральным
телом является неизбежным.
Используя решения упомянутых эволюционных
уравнений, нами было получено описание
многообразия таких начальных условий, при которых эволюция орбит неизбежно
приводит к соударению спутника с центральным телом.
В теореме 1 показано, что «диапазон
критических» значений наклонения (при которых соударение спутника с центральным
телом является неизбежным) зависит от отношения величины a большой полуоси орбиты спутника к радиусу
центрального тела. При начальных значениях наклонения, принадлежащих этому
диапазону, соударение спутника с центральным телом неизбежно при любых
начальных значениях остальных орбитальных элементов.
В теореме 2 показано, что при начальных
значениях наклонения, лежащих вне указанного критического диапазона, в области
начальных значений эксцентриситета e орбиты (и связанной с эксцентриситетом переменной e = 1-e2) имеются границы Ge(a,i0)>0 и Ge(a,i0)>0, разделяющие на две части каждую из
областей возможных значений e
(и e0). При значениях e0, лежащих справа от границы Ge, при любых начальных условиях остальных
орбитальных элементов соударение спутника с центральным телом исключено.
В теореме 3 для области значений e0, лежащих слева от границы Ge(a,i0), указана граница Gw(a, i0, e0), разделяющая область начальных значений переменной w0 на две части по признаку неизбежности соударения спутника с
центральным телом.
Область практического применения этих теорем
при выборе долгоживущих орбит ИСЗ ограничена (снизу) значениями большой полуоси
орбиты спутника, при которых существенную роль играет сжатие центрального тела.
Установлено, что для системы тел: Земля, Луна, ИСЗ эта граница Ga проходит через значение a = 7 радиусов Земли. Для системы тел: Земля,
Солнце, ИСЗ Ga = 8 радиусов Земли. Следует отметить, что и в области a < Ga соударение спутника с центральным телом под
влиянием гравитационных возмущений не исключается, хотя эволюция угловых
элементов происходит по другим законам (обусловленным сжатием планеты) и
сформулированные теоремы не выполняются.
Другой фактор, вносящий свои коррективы в
картину эволюции орбит ИСЗ, – это прецессия орбиты Луны. В настоящее время
проводятся исследования различных аспектов влияния этого фактора. С этой целью
разработан графо-аналитический метод, позволяющий наглядно представить эволюцию
орбит в пространстве характерных параметров. Эта работа будет продолжена в
следующем году.
По
результатам работы сделан доклад на семинаре в ИКИ и опубликована статья в «Трудах
Математического института им. Стеклова»
с.н.с.
к.ф.-м.н. В. И. Прохоренко, тел. 333-50-45, vprokhor@iki.rssi.ru
8. Проведение исследований по проекту MetNet создания сети малых
метеостанций на Марсе (науч. рук. В.М. Линкин).
Проведен детальный анализ траекторий перелета Земля–Марс
при выведении КА в 2009, 2011 и 2013 гг. на круговую орбиту ИСЗ высотой 750 км
или орбиту типа «Молния» и дальнейшем полете с малой тягой. Анализ проводился
для четырех вариантов, отличающихся типами и электрической мощностью
электрореактивных двигателей (ЭРД) малой тяги. Анализировались следующие
участки траектории КА:
1) Разгон
малой тягой по спиральной траектории у Земли и выведение на гелиоцентрическую
орбиту. Время разгона варьировалось от минимально возможного (1.5–3 месяца в
зависимости от типа и мощности ЭРД) до 1 года. Была получена зависимость
расхода рабочего тела от времени разгона.
2) Перелет
Земля–Марс с малой тягой по оптимальной гелиоцентрической траектории в 2009,
2011 и 2013 гг.
3) Торможение
малой тягой в сфере действия Марса и выведение КА на ареоцентри-ческую орбиту;
торможение малой тягой, как и разгон у Земли, осуществляется по спиральной
траектории. Рассматривались 2 варианта: выведение на 2-х и 3-х суточную орбиту
спутника Марса. Как и в случае разгона, время торможения ваоьировалось от
минимально возможного (0.5–1 месяц) до года.
Получены
массовые характеристики КА для различных типов и мощностей ЭРД, разных дат
полета и всех перечисленных выше вариантов разгона и торможения. Результаты
имеются в виде отчета и рабочих материалов.
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
9. Анализ возможности захвата КА в верхней атмосфере
планет-гигантов (инициативное исследование)
Захват КА в верхней атмосфере невозможен без точного
знания плотности атмосферы как функции высоты. Была рассмотрена идея уточнения
параметров верхней атмосферы непосредственно перед захватом путем сброса с
борта КА малых зондов, их входа в атмосферу перед захватом и передачи на борт
КА данных о величине торможения зондов в атмосфере на разных высотах. На
примере Нептуна проведен детальный анализ необходимой скорости и точности
отделения зондов от КА в зависимости от времени отделения, возможности
определения орбит зондов по наблюдениям с борта КА, скорости входа зондов в
атмосферу и величины их торможения в атмосфере. Анализ проводился как
аналитически, так и численно, с помощью специально созданных программ на
компьютере. Результаты анализа оказались негативными: высокая скорость и
требуемая точность отделения зондов приводят к сложности и большой массе
механизма отделения. Для получения необходимой точности определения орбит
зондов требуется сложная и массивная навигационная система. Перегрузки зондов
при торможении в атмосфере настолько велики (до
Результаты:
отчет, рабочие материалы, программы на компьютере.
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
10. Модификация программного обеспечения для
оптимизации межпланетных перелетов с малой тягой
Программа
оптимизации межпланетных перелетов с малой тягой была написана в среде DOS (Console Application в пакете Fortran 4.0). В
ходе работ 2007-го года программа была переведена в графическую среду (QuickWin
Application) и адаптирована к более современному и мощному пакету Fortran 6.5.
Были разработаны удобное меню ввода данных и графический вывод данных
(визуализация перелетов) в реальном времени работы программы. Программа была
дополнена интерактивным управлением работой программы и вводом-выводом данных.
Дополнительные возможности в совокупности с визуализацией промежуточных
результатов работы программы существенно расширили удобство работы с программой
и ее применимость. В частности, появилась возможность рассчитывать перелеты с
малой тягой к дальним планетам (например, к Нептуну) и перелеты с несколькими
полными оборотами траектории перелета вокруг Солнца, что в прежней версии
программы было крайне затруднительно.
Некоторые
фрагменты работы программы на примере полета к Марсу, а также меню
интерактивного управления иллюстрируются рисунками 1–4.
Результаты работы: рабочие материалы,
программа на компьютере, результаты тестовых расчетов.
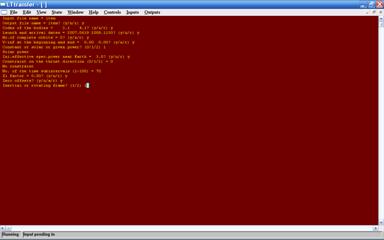
Рис. 1. Ввод данных.
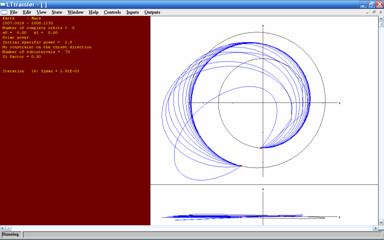
Рис. 2. Визуализация
промежуточных результатов работы программы.
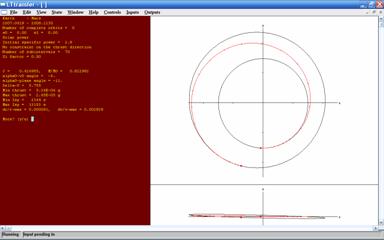
Рис. 3. Результат
работы программы: параметры оптимальной траектории
и ее изображение в
даух проекциях.
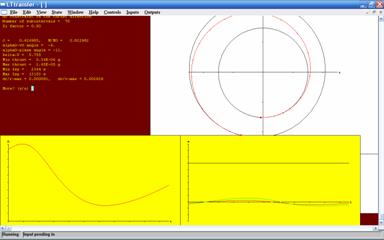
Рис. 4.
Дополнительный результат работы программы: графики величины
и углов направления
вектора тяги в зависимости от времени.
с.н.с.,
к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
11.
Перспективные методы формирования управления подвижными объектами
1. Предложен и реализован для ряда оптимальных задач навигации новый метод решения многопараметрических задач линейного программирования. Этот метод позволяет избежать вычислительных проблем, которые возникают при появлении почти вырожденных решений (т.е. решений с малыми значениями базисных переменных), а также в случаях, когда базисная матрица плохо обусловлена. Идея состоит в переходе к строго вырожденной задаче и решении вспомогательной задачи меньшей размерности. Предложено дальнейшее развитие этого метода – скелетный алгоритм, гарантирующий отсутствие почти вырожденных итераций и не требующий операций обращения матриц. Алгоритм опробован на оптимальных задачах минимаксного оценивания для полиномиальной и тригонометрической моделей.
Две публикации по этой теме: в
трудах международной конференции SICPRO-2007 и в сборнике трудов МАИ (выходит в апреле
2008 г.) Авторы: Б.Ц. Бахшиян, К.С.
Федяев, А.В. Горяинов.
2. Рассмотрен
вопрос о неоднозначности оценки наименьших модулей при линейных ограничениях на
оцениваемые параметры. Предлагается эффективный алгоритм нахождения множества
оценок и выбора подходящей точечной оценки. Публикация
– тезисы международной конференции PhysCon – 2007. Авторы: Б.Ц. Бахшиян, М.И.
Войсковский.
3. Исследована
связь между задачей оптимальной фильтрации для линейных динамических систем с
запаздыванием на случай ненулевых начальных условий и задачей фильтрации для линейных систем без запаздывания,
но с произвольно коррелированным шумом в объекте (с заданной корреляционной
функцией). Показано, что задача фильтрации при произвольно коррелированном шуме
в объекте является частным случаем соответствующей проблемы с запаздыванием, в
которой запаздывание равно длине интервала измерений, а член с запаздыванием равен
члену с коррелированным шумом в объекте.
Две публикации в ДАН , 2007г. Т.412, N 2 и в
тезисах международной конференции
PhysCon – 2007. Автор: Матасов А.И.
4. Рассмотрена проблема существования решения в задаче оптимального управления твердого тела с осевой симметрией для произвольного случая краевых условий. В качестве критерия выступает интегрально-квадратичный функционал, согласованный с симметрией вращающегося тела, характеризующий энергозатраты. Управлением считается главный момент внешних сил, время окончания процесса может быть как фиксированным, так и свободным. Для фиксированного времени показано, что решение существует в классе бесконечно-дифференцируемых функций времени. Для случая, когда время окончания процесса не фиксировано, показано, что решение задачи в классе измеримых функций не существует.
Публикация в тезисах докладов Международной
конференции по математической теории управления и механике, 2007 г. Автор:
Сиротин А.Н.
5. Рассматриваются конечномерные линейные стационарные системы с дискретным временем и ограниченным управлением. Выделен класс 0-управляемых систем, у которых размерности векторов состояния и управления совпадают. Для данного семейства систем предложен подход, позволяющий формировать ограниченное управление как функцию текущего состояния в задаче достижения начала отсчета за конечное время. Приводится обоснование одного метода формирования управления с обратной связью для одного класса дискретных систем с ограничениями.
Публикация
в Известиях АН. Теория и системы управления, 2007, № 4. Автор: Сиротин
А.Н.
д.ф.-м.н. Бахшиян Б.Ц. bbakhshiyan@gmail.com
12. Исследование способов построения транспортной
системы Земля-Луна с использованием вращающихся тросовых систем, движущихся по
орбитам около Земли и Луны. Оценка возможности создания транспортной трассы
между Землей и Марсом с использованием
тросовых систем
Исследованы способы построения транспортной
системы Земля – Луна с использованием вращающихся тросовых систем (пращей),
движущихся по орбитам (ОТС) около Земли и Луны. Оценены возможности создания
транспортной трассы между Землей и Марсом с использованием тросовых систем.
Рассмотрен принципиально новый способ перемещения в космическом пространстве, в
некотором смысле альтернативный ракетной технике. Исследования показывают, что
используя градиент сил притяжения, можно построить эффективную транспортную
артерию, своеобразный фуникулер, для перемещения объектов в космическом
пространстве. В качестве основного элемента такой транспортной системы
предлагается использовать тросовую систему, выведенную на орбиту спутника. ОТС
представляет собой два концевых блока, соединенных тросом. К концевым блокам
пристыкованы обменные грузы. Тросовая система находится во вращательном состоянии вокруг общего
центра масс (праща). Режим вращения таков, что трос постоянно находится в
натянутом состоянии. Обменные грузы могут отцепляться и затем пристыковываться
к концевому блоку другой пращи; таким образом, праща используется для изменения
параметров движения груза, движущегося между двумя ОТС по своей баллистической
кривой, определяемой моментом отцепления.
Математическое моделирование
показывает, что в зависимости от используемых алгоритмов управления длиной
троса можно изменять угловую скорость вращения пращи, а также изменять
параметры орбиты системы, т.е. увеличивать (или уменьшать) ее эксцентриситет и
большую полуось орбиты.
Ключевым положением является
предложение о построении группировки космических объектов, которые в
совокупности представляют собой постоянно действующую транспортную трассу в
космическом пространстве. В группировку
включены орбитальные тросовые системы и обменные грузы, которые могут
осуществлять перелет от одной тросовой системы к другой. Перелеты выполняются
без применения ракетной техники. Задача выполнения космических полетов, таким
образом, решается поэтапно: сначала строится транспортная трасса в космическом
пространстве от одного пункта до другого, например, от Земли до Луны, а потом
по этой трассе многократно перевозятся грузы в обоих направлениях.
Решение задачи стыковки (5.1.13.)
позволит реализовать новый метод доставки с Земли грузов в состав группировки.
Т.к. скорость концевого блока есть векторная сумма скорости движения центра
масс ОТС и скорости вращательного движения вокруг центра масс, то для
реализации контакта груза с концевым блоком ОТС в ближайшей к поверхности Земли
точке потребуется меньшая скорость, чем орбитальная скорость пращи. Для пращи с
радиусом 100км, высотой круговой орбиты 300км и
касательной скоростью концевого блока 1600м/с эта скорость меньше на
1660м/с. Подобные условия вывода могут сделать эффективным использование авиационно
– космической системы.
После выполнения контакта груз
включается в состав группировки; по мере подъема груза на более высокие орбиты его энергия увеличивается, но
одновременно на ту же величину уменьшается энергия ОТС. Параметры орбит, в
принципе, можно восстановить, но энергетически гораздо выгоднее транспортная
трасса, работающая по принципу фуникулера. Если эквивалентный по массе груз
перемещать в обратном направлении от более высокой пращи к более низкой и в
ближайшей к Земле точке траектории отделить груз, то все параметры движения
объектов вернутся к исходным значениям.
Предлагаемая схема группировки
космических объектов позволяет по – новому подойти к реализации межпланетных
полетов. По нашему мнению, основываясь на достигнутом уровне техники, можно
создать межпланетную космическую трассу, которая представляет собой группировку
космических объектов, предназначенную для выполнения циклических перелетов
между планетами. Схема движения и перестройки выбрана таким образом, что
группировка, находясь в поле тяготения двух тел, сохраняет неизменным
гравитационный потенциал, и поэтому для выполнения полета не требуется
применения ракетных двигателей.
Задача эскизного описания
конструкции и архитектуры такого сложного космического объекта требует оценки
многих вариантов и проведения цикла исследований. Рассмотрен один из
предварительных вариантов такой системы, который показывает принципиальную
возможность создания космической станции для циклических перелетов по трассе
Земля – Луна.
В начальный момент времени группировка состоит из объектов TG,
TS, ОТС. На рисунке показана тросовая система TG, центр масс которой движется по
эллиптической орбите OK, с высотой апогея 60000 – 80000км и высотой
перигея 600 – 800км. Модуль КС – это собственно космическая станция. КС
пристыкована к концевому блоку AK. Система TG – праща; тросовая система TS движется около Луны по полярной орбите OS, близкой к круговой с высотой перицентра 100 – 150км. Орбиты ОТС и OK – полярные и не испытывают возмущения из-за
несферичности Земли.
Схема полета космической станции
следующая. В момент времени, когда тросовая система TG при движении по орбите OK находится вблизи перигея в точке E 1, от концевого блока AK отделяется космическая станция КС. Момент
отделения выбирается таким образом, что после отделения скорость КС
относительно Земли равна сумме орбитальной скорости TG и касательной скорости вращения блока AK. После отделения от TG космическая станция выходит на траекторию OP полета к Луне. После отделения TG теряет скорость, и апогей ее орбиты OM уменьшается по сравнению с апогеем исходной
орбиты OK. Управляющими параметрами, которые формируют
необходимую траекторию в момент отделения, являются: текущие координаты центра
масс, скорость вращения пращи, фаза отделения, длина троса. Баллистические
расчеты показывают, что при выборе конкретных значений параметров траектория
полета КС достигает окрестности Луны. При этом выполняется условие, что вблизи
поверхности Луны траектория проходит так, что обеспечивается возможность
реализации захвата концевым блоком тросовой системы TS космической станции КС. Для этого необходимо
организовать пролет КС на заданной высоте от поверхности Луны и с условием,
чтобы плоскость орбиты OP вблизи Луны совпала с плоскостью орбиты OS. Для полного совпадения граничных условий в
зоне контакта с помощью вариации длины троса изменяются параметры вращения TS . Таким образом формируется номинальная
траектория, которая обеспечивает выход космической станции на стыковку с
тросовой системой TS . Для устранения ошибок измерительных и
исполнительных органов необходимы коррекции траектории OP с помощью автономных корректирующих ракетных
двигателей. На заключительном этапе полета происходят сближение и стыковка с
TS, и космическая станция переходит на
эллиптическую орбиту OС около Луны. Далее выполняется несколько
витков около Луны, затем КС отделяется. Тросовая система TS возвращается на исходную орбиту OS. КС совершает перелет к Земле и вблизи
перигея орбиты OM
стыкуется с тросовой системой TG. На этом цикл заканчивается. Выше изложена схема круизного перелета.
Но эта же система может быть использована для доставки груза с Земли на Луну, а
лунного – на Землю. Энергетически выгодней двусторонний равновесный обмен: на
Луну доставляется полезный груз, например, для строительства базы, а в обратном
направлении транспортируется лунный грунт.
В качестве одного из вариантов
реализации транспортной трассы предлагается использовать тросовую систему TS для
более экономичного обмена грузов с поверхностью Луны. Круговая скорость центра
масс TS около 1600м/с.
Концевой блок TS имеет
касательную скорость 1500м/с. Близкие значения скоростей позволяют осуществить
отделение от концевого блока взлетно – посадочного КА на сравнительно малой
высоте 2 – 3км и с относительной скоростью около 100м/с. Посадка КА на
поверхность выполняется ракетным двигателем. Далее на Луне КА загружается
балластом и выводится на контакт с концевым блоком модуля на высоту 2 – 3км со
скоростью100м/с.
Транспортная операция начинается
с момента, когда ракетой или авиационно – космической системой груз
доставляется на контакт с концевым блоком ОТС; далее груз передается на
тросовую систему TG , затем проходит по системе, обменивается на поверхности Луны на
балласт и возвращается на концевой блок ОТС, от которого потом отделяется.
Предварительный анализ показывает, что использование тех же принципов
позволит создать межпланетную станцию для циклических перелетов на трассе Земля
– Марс. По мнению сотрудников, занимающихся разработкой настоящей тематики,
создание транспортных артерий позволит в перспективе решить задачу межпланетных
полетов. Однако вопрос оптимизации большого количества взаимосвязанных
параметров, определяющих архитектуру всей группировки, требует рассмотрения
большого количества различных вариантов построения. Сюда относится и выбор материала пращи,
определяющий, с одной стороны, запас ее прочности, а с другой, – вес, и количество ОТС (может оказаться,
например, что в некоторых случаях использование трех пращей целесообразнее, чем
двух) и габариты пращей, и выбор орбит ОТС (с учетом, например, наличия
радиационных поясов), и фаз отделения груза, и т.д., т.д.
В целом, предложение о создании
группировки космических объектов для
межпланетных полетов имеет три центральных момента: развертывание и
управление тросом; решение задачи стыковки и, третий, - выбор параметров и размещения ОТС в космическом пространстве,
оптимальных для рассматриваемой трассы.
Математическое моделирование, в
котором используются характеристики реально существующих сегодня исполнительных
органов и материалов показывает, что научно – техническая база современной
ракетно – космической техники достаточна для создания межпланетных транспортных
трасс.
д.т.н.
Сидоров И.М., тел.333-14-89
13.
Разработка способов прецизионного сближения и стыковки обменных грузов между
вращающимися тросовыми системами, двигающимися по разным орбитам
Разработаны способы прецизионного сближения и
стыковки обменных грузов между вращающимися тросовыми системами, двигающимися
по разным орбитам. Решение этих задач необходим для реализации доставки с Земли
грузов в состав группировки и перемещения их по космической трассе (5.1.12.) от
одной орбитальной тросовой системы (ОТС)
к другой.
Скорость движения относительно поверхности
планеты обменного груза, который пристыкован к концевому блоку, определяется
как сумма вектора орбитальной скорости центра масс ОТС и вектора касательной
скорости вращения блока относительно центра масс пращи. Если в определенной
фазе вращения отделить груз от концевого блока, то орбита движения груза
определяется вектором скорости в момент отделения. Задача состоит в том, чтобы
определить необходимую скорость вращения пращи и фазу отделения так, чтобы груз
вышел на контакт с концевым блоком следующей пращи.
Момент отделения груза от пращи и параметры
дальнего сближения определяются с помощью спутниковой системы глобального
позиционирования. Вычисляется номинальная траектория перелета. При выполнении
перелета ввиду неизбежных ошибок измерительных систем и исполнительных органов
траектория движения груза отклоняется от номинальной. Предполагается, что
коррекция движения выполняется корректирующими ракетными двигателями,
установленными на передаваемом грузе. На конечном этапе решается задача
стыковки.
Подробно рассмотрена новая схема стыковки с
автоматическим управлением процессом сближения и посадки, работающая с
использованием алгоритма с «моделью» и решением краевой задачи. Схема
выполнения стыковки в данном случае существенно отличается от применяемого в
настоящее время метода стыковки космических аппаратов, разработанного в 60-е
годы и не претерпевшего до настоящего времени принципиальных изменений.
В общем случае вектор скорости обменного
груза существенно отличается от вектора скорости центра масс ОТС. Но при
соответствующем выборе длины троса, скорости и фазы вращения пращи в момент
контакта параметры движения груза и концевого блока пращи, на который
перелетает груз, совпадают. Никакого зависания, как в современной схеме
стыковки, здесь быть не может, и контакт происходит в заданный момент времени.
В системе координат, связанной с точкой контакта, концевой блок пращи, к
которому летит груз, движется по циклоиде, и в момент контакта требуется
обеспечить касание точкой возврата циклоиды стыковочного узла груза. После
срабатывания системы захвата груз будет находиться под действием силы натяжения
троса.
Моделирование процессов сближения космических
объектов показывает, что при значительных отклонениях от номинала параметров
движения груза на начальном этапе перелета обеспечивается в заданный
фиксированный момент времени контакт с концевым блоком с точностью по линейным
координатам в пределах 1см.
д.т.н.
Сидоров И.М., тел.333-14-89
14. Системы технического зрения в решении задач навигации и
терминального управления
В рамках указанной тематики проводились работы по ряду направлений и получены следующие результаты:
- Отработка алгоритмов селекции аномальных ошибок установления соответствия. Для монокулярного режима разработан критерий селекции по локальной согласованности оптического потока. Для стереоскопического режима разработан критерий, близкий к критерию Роснера.
- Отработка спектрального представления в базисе Уолша-Адамара образов окрестностей реперных точек с вложением носителей различных спектральных компонент. Отработана методика отбора коэффициентов спектрального представления.
- Отработан алгоритм двухканального измерителя (грубый и точный каналы) для стереоскопической системы технического зрения. Такие алгоритмы требуют значительно меньше вычислительных ресурсов и допускают реализацию на бортовых процессорах ограниченной вычислительной мощности в реальном времени.
- Получена модель точностных характеристик стереоскопической системы технического зрения, пригодная для реализации в режиме реального времени бортовыми процессорами. Модель предназначена для комплексирования информации, поступающей от системы технического зрения, с бортовой инерциальной навигационной системой.
с.н.с., к.т.н. В. А. Гришин. Тел.
333-11-88. E-mail: vgrishin@iki.rssi.ru