Тема ВСКИ Исследование проблемы прецизионного
координатно-временного обеспечения (ККВО) видеоспектрометрических космических
исследований Земли и других небесных тел, реализуемого по данным бортовых
навигационных измерений. Разработка и моделирование аппаратно-программных
решений задачи КВО.
Гос.
регистрация. № 0120.0 602989
Научный руководитель к.ф.-м.н. А.А. Форш
5.3.0.
Исследование проблемы прецизионного координатно-временного обеспечения (КВО)
видеоспектрометрических космических исследований Земли и других небесных тел,
реализуемых по данным бортовых навигационных измерений. Разработка и
моделирование аппаратно-программных решений задачи КВО.
В состав экспериментального комплекса
координатно-временного обеспечения (ККВО), который планируется установить на
борту космического аппарата (КА) «Метеор-М» № 1 входят: аппаратура спутниковой
навигации (АСН-М-М), прибор астроориентации БОКЗ-М и три датчика угловой
скорости (ДУС). АСН-М-М обеспечивает определение параметров орбитального
движения КА с привязкой измерений к шкале всемирного координированного времени
UTC, а звездный координатор БОКЗ-М – измерение параметров инерциальной
ориентации КА. Измерения угловых скоростей вращения КА, выполненные тремя ДУС,
дополняют данные об ориентации, полученные БОКЗ-М.
Целью моделирования является отработка
алгоритмов географической привязки видеоданных, получаемых с помощью целевой
аппаратуры.
В процессе моделирования показаний
навигационных приборов были решены вопросы,
касающиеся имитации местоположения и скорости спутника в геоцентрической
гринвичской системе координат в зависимости от параметров орбиты, а
также ориентации спутника вследствие работы системы стабилизации КА.
Результатом моделирования является формирование файла в двоичном формате, в
котором содержится информация о навигационных измерениях приборов ККВО,
идентичный файлу, передаваемому с борта КА «Метеор-М» №1.
Обработка навигационных измерений направлена
на получение данных, необходимых для решения задачи привязки видеоданных.
Интерполяция навигационных изменений производится с частотой равной строчной
частоте съемочной системы (156,25 Гц).
Разработаны алгоритмы, реализующие
интерполяцию местоположения и скоростей КА по модельным показаниям АСН-М-М, а
также проведен анализ величины ошибки интерполяции в зависимости от величины
погрешности прибора. В результате проведенного анализа было выяснено, что
точностные характеристики прибора определяют выбор типа интерполяции, при
котором ошибка интерполяции минимальна.
Разработаны алгоритмы, необходимые для
интерполяции параметров ориентации КА по данным измерений БОКЗ-М и трех ДУС:
·
первичной
обработки информации, получаемой с ДУС (первичная фильтрация, направленная на
удаление аномальных наблюдений, проявившихся, в том числе, по причине отказа
одного из датчиков);
·
получения
реализации показаний ДУС путем усреднения дублируемых измерений, сглаживания
полученной реализации;
·
определения
углового положения КА путем интегрирования показаний ДУС (начальные условия
выбираются в соответствие с показаниями БОКЗ);
·
уточнения
углового положения КА по показания БОКЗ в конечной точке интегрирования.
Разработанные алгоритмы могут быть
использованы для географической привязки с точностью 25 метров.
5.3.1.1. Разработка технических
предложений по координатно-временному обеспечению полетов ИСЗ и координатной
привязки проводимых с них съемок и изменений.
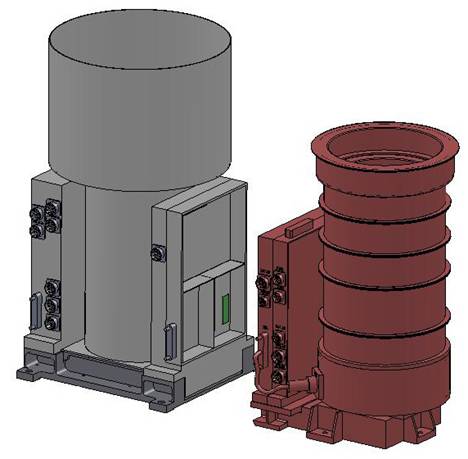
Разработаны две модификации
интегрированного прибора БОКЗ-МФ и БОКЗ-М60. Они представляют собой звездный
датчик ориентации с встроенными датчиками угловой скорости. Внешний вид
приборов БОКЗ-МФ и БОКЗ-М60 представлен на рис.1.


Рис.1. Внешний вид приборов БОКЗ-МФ (слева) и
БОКЗ-М60 (справа).
Проработаны варианты интегрированного
прибора, в состав которого входит звездный датчик ориентации, датчики угловой
скорости и приемник спутниковых навигационных систем. На рис. 2 показаны 3D-модели
нового интегрированного прибора БОКЗ-М60/1000 и прибора БОКЗ-М60. В табл. 1
представлены сравнительные характеристики приборов БОКЗ-М, БОКЗ-М60,
БОКЗ-М60/1000.
Рис.2. 3D-модели приборов БОКЗ-М60/1000 (слева) и
прибора БОКЗ-М60 (справа).
Таблица 1.
|
|
БОКЗ-М |
БОКЗ-М60 |
БОКЗ-М60/1000 |
|
Точность оптических измерений σx,y/ σz, “ |
2/20 |
1,5 / 15 |
1/10 |
|
Шум ДУС σ, “/c |
- |
120 |
10 |
|
Дрейф ДУС σ, º/ч |
- |
60 |
3 |
|
Точность определения положения на орбите σ, м |
- |
- |
15 |
|
Частота обновления, Гц |
0,3 |
1 |
4 |
|
Угол поля зрения, ° |
8x8 |
8x8 |
16x16 |
|
Масса, кг |
4 |
4 |
5 |
|
Мощность, Вт |
8 |
9 |
14 |
|
Размеры, мм |
370´230´230 |
370´230´230 |
410´230´230 |
Разрабатываемый прибор БОКЗ-М60/1000 будет
обладать более светосильной оптикой и ПЗС матрицей
размером 1000х1000 элементов, что позволит увеличить точность оптических
измерений и увеличить частоту выдачи информации. Датчики угловой скорости будут
иметь точность соразмерную с точностью оптического канала.
В состав прибора входит навигационный модуль
РНПИ производства ЗАО КБ «Навис». В конструктив прибора БОКЗ-М60 добавлен блок
электроники, который расположен симметрично относительно бленды. В этом блоке
располагается модуль ДУС и навигационный модуль РНПИ (рис.3).
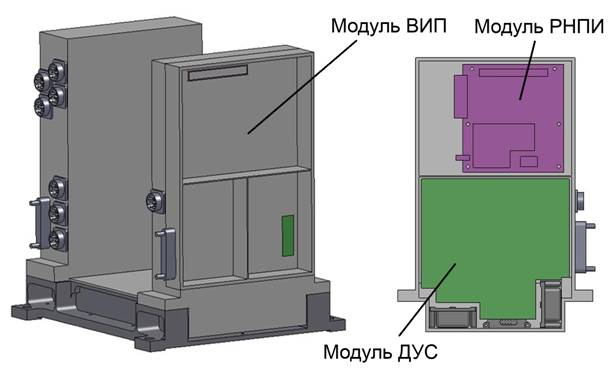
Рис. 3. Навигационный модуль и модуль ДУС в
интегрированном приборе.
Использование трех видов датчиков в одном
приборе позволяет получать полную информацию о движении космического аппарата.
Таким образом, координатная привязка данных с полезной нагрузки может
осуществляться одним прибором. Для увеличения надежности и точности получаемых
данных возможна организация режима, при котором приборы обмениваются данными по
шине МКО и навигационные данные рассчитываются с учетом показаний нескольких
приборов.
5.3.1.2.
Разработка ПАО бортовой обработки данных ТСНН для обеспечения спуска и посадки
на Фобос.
Разработано программно-алгоритмическое
обеспечение (ПАО) ТСНН в режиме «Посадка», обеспечивающее управление работой
камер ТСНН, автономную обработку получаемых ими изображений и обмен информацией
с Бортовым вычислительным комплексом (БВК) при спуске КА на поверхность Фобоса.
После получения команды синхронизации осуществляется экспозиция и считывание
изображения с ПЗС-матрицы. Далее выполняются:
-
коррекция
засветки, загрубление разрешения изображения и подготовка кадра репортажной
съемки,
-
выделение
опорных точек для стерео-обработки,
-
обмен
информацией между камерами о параметрах опорных точек,
-
построение
карты пригодности (только для ШТК),
-
нахождение
соответствия опорных точек в стерео-режиме и расчет
расстояния до поверхности Фобоса,
-
определение
бокового смещения по опорной точке, выделенной в моно-режиме
на предыдущем цикле в той же камере, (только для ШТК),
-
поиск
новой опорной точки в моно-режиме для определения
бокового смещения на следующем цикле (только для ШТК),
-
передача
репортажного кадра, карты пригодности и результатов измерений расстояния и
бокового смещения в БВК.
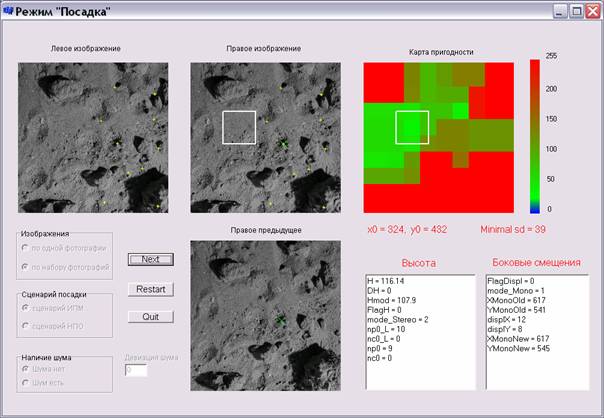
Интерфейс управляющей программы отладки ПАО
ТСНН в режиме «Посадка» отображает (слева направо и сверху вниз):
-
текущий
«левый» кадр стерео-пары с указанием положения
выбранных опорных точек для стерео-измерения высоты;
-
текущий
«правый» кадр стерео-пары, с указанием: (а) положения опорных
точек для стерео-измерения высоты, для которых установлено соответствие с
«левым» кадром, (б) положения опорной точки для определения бокового смещения,
для которой установлено соответствие с предыдущим «правым» кадром, и (в)
положения оптимальной площадки для посадки;
-
карту
пригодности с указанием положения оптимальной площадки для посадки,
-
управляющие
элементы для выбора последовательности модельных изображений,
-
предыдущий
«правый» кадр (под текущим «правым» кадром) с указанием положения выбранной
опорной точки для определения бокового смещения,
-
окна с
результатами измерения высоты и бокового смещения.
5.3.1.3.
Разработка алгоритмов обработки изображений для решения задач управления
посадкой летательных аппаратов.
В системах технического зрения, используемых
для решения задач управления движением, используются алгоритмы установления
соответствия изображений одних и тех же точек поверхности на последовательности
кадров, снятых одной камерой или на стереопарах. Точность и надежность этих
алгоритмов оказывают определяющее влияние на параметры систем технического
зрения. Вычислительные затраты на процесс установления соответствия поглощают
львиную долю ресурсов, используемых системой технического зрения.
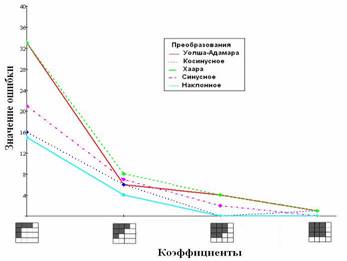
Для представления образов окрестностей
используется спектральное представление. Особенностью данного представления
является использование вложенных носителей для различных участков спектра. В
рамках указанного направления проведены исследования влияния использованного базиса
на количество аномальных ошибок установления соответствия, а также набора
использованных коэффициентов спектрального представления. В качестве базисов
использовались системы ортогональных функций Уолша-Адамара, Хаара,
косинус-преобразования, синус-пробразования, наклонного преобразования (см.
рисунок).
Кроме того, проведены работы по уменьшению
вычислительной сложности алгоритмов расчета спектральных коэффициентов, а также
вычислительной сложности процесса установления соответствия.
Проведены работы в области оценивания
величины нормальных ошибок установления соответствия исходя из
результатов локального анализа структуры целевой функции установления
соответствия в окрестности экстремума. Указанные оценки являются исходными
данными, по которым формируются статистические оценки точности параметров
движения и профиля визируемой поверхности, формируемыми системами технического
зрения в реальном времени.
Проведены работы по исследованию
характеристик и оптимизации параметров двухканальных измерителей (грубый и
точный каналы) для монокулярной и стереоскопической системы технического
зрения. Такие алгоритмы требуют значительно меньше вычислительных ресурсов и
допускают реализацию на бортовых процессорах ограниченной вычислительной
мощности в реальном времени. Проведены работы по оценке влияния частотных
характеристик фильтров, осуществляющих префильтрацию при формировании
изображений грубого канала на количество аномальных ошибок установления
соответствия.
Публикации по теме:
1.
Дятлов С.А., Куркина А.Н., Бессонов Р.В., Василейский
А.С. Наземная отработка аппаратуры
спутниковой навигации для комплекса координатно-временного обеспечения
космического аппарата «Метеор-М» № 1 Шестая Всероссийская Открытая конференция
«Современные проблемы дистанционного зондирования Земли из космоса» ИКИ РАН, 10
– 14 ноября 2008 г.
2.
Г.А. Аванесов, Я.Л. Зиман, А.А. Форш, С.А. Дятлов,
Р.В. Бессонов, А.Н. Куркина, А.С. Василейский Комплекс средств для координатно-временного
обеспечения космического аппарата «Метеор-М» №1. Всероссийская научно-техническая
конференция “Современные проблемы определения ориентации и навигации
космических аппаратов”. Таруса 22–25 сентября 2008 г.
3. Р.В.
Бессонов, С.А. Дятлов, А.Н. Куркина, В.А. Красиков, М.И. Куделин, В.Г. Собчук,
А.А. Форш Особенности построения и
функционирования приборов БОКЗ с встроенными датчиками угловой скорости.
Всероссийская научно-техническая конференция “Современные проблемы определения
ориентации и навигации космических аппаратов”. г. Таруса 22–25 сентября 2008 г.
4. С.А. Дятлов,
Р.В. Бессонов, А.Н. Куркина
Разработка и исследование алгоритмов функционирования
интегрированного прибора ориентации космического аппарата. XVII
международный научно-технический семинар “Современные технологии в задачах
управления, автоматики и обработки информации”, сентябрь 2008г. г. Алушта.
5. С.А. Дятлов,
Р.В. Бессонов, А.Н. Куркина
Интеграционный путь развития навигационных приборов системы
управления космического аппарата. Всероссийская научно-техническая
конференция “Актуальные проблемы ракетно-космического приборостроения и
информационных технологий” 28-30 апреля 2008 года, Москва, РНИИ КП.
6.
Б.С.Жуков, С.Б.Жуков, В.А.Гришин, Р.В.Гордеев. Бортовое программно-алгоритмическое обеспечение
информационной поддержки посадки на Фобос. Всероссийская
научно–техническая конференция «Современные проблемы определения ориентации и
навигации космических аппаратов». Таруса, 22-25 сентября 2008. Сборник тезисов
конференции.
7.
В.А. Гришин, Б.С. Жуков, С.Б. Жуков. Р.В. Гордеев. Телевизионная Система Навигации и Наблюдения:
Программно-алгоритмическое обеспечение процесса посадки на Фобос. Версия 3.
Научно-технический отчет. М., ИКИ РАН, 2008.
8. Гришин В. А. “Оптимизация состава спектральных
коэффициентов базиса преобразования Адамара для решения задач
установления соответствия изображений” // Пятая Юбилейная Открытая
Всероссийская конференция “Современные проблемы дистанционного зондирования
Земли из космоса”. Москва, ИКИ РАН, 12-16 ноября 2007 г. Сборник научных статей
Вып. 5. Т. 1. С. 77-83.
9.
Гришин В. А. “Оценка точности установления соответствия” //
Доклады 10-ой Международной конференции и выставки “Цифровая обработка сигналов
и ее применение”, 26-28 марта 2008 года. Серия: Цифровая обработка сигналов и
ее применение. Выпуск: Х-2. С. 428-431.
10. Гришин В. А.,
Белинская Е. В. “Сравнение спектральных
представлений образов окрестностей точек для решения задач установления
соответствия” // Сборник тезисов конференции: Шестая всероссийская открытая
ежегодная конференция “Современные проблемы дистанционного зондирования Земли
из космоса” Москва, ИКИ РАН, 10-14 ноября 2008 г
(http://d902.iki.rssi.ru/theses-cgi/thesis.pl?id=1247).
11. Гришин В. А. “Алгоритмы измерения высоты и компонент скорости по
телевизионным изображениям при посадке на Фобос” // Тезисы докладов
Всероссийской научно-технической конференции “Современные проблемы определения
ориентации и навигации космических аппаратов”. ИКИ РАН. Россия. Таруса. 22-25
сентября 2008 г. С. 35-36. Полный текст доклада представлен для публикации в
сборнике трудов конференции.
12.
Гришин В. А. “Оценка точности
установления соответствия в системах технического зрения” // Расширенная версия
доклада на 10-ой Международной конференции и выставке “Цифровая обработка
сигналов и ее применение” 2008 года представлена для публикации в редакцию
журнала “Цифровая обработка сигналов”.
13. Бессонов Р.В. Интегрированные приборы ориентации космических
аппаратов. Материалы международной научно-технической конференции и Российской
научной школы молодых ученых и специалистов, М.:Радио и связь, 2008.
14. Бессонов
Р.В., Дятлов С.А., Куркина А.Н., Красиков В.А., Куделин М.И., Собчук В.Г., Форш
А.А. Особенности функционирования и
построения приборов БОКЗ с встроенными датчиками угловой скорости.
Всероссийская научно-техническая конференция “Современные проблемы определения
ориентации и навигации космических аппаратов”. г. Таруса 22–25 сентября 2008 г.