Тема УПРАВЛЕНИЕ Исследования в области динамики сложных механических
систем, проектирования орбит и построения математических моделей планирования
космических экспериментов
Гос. регистрация
№ 01.20.03 03442
Научный руководитель
д.т.н. Р.Р. Назиров
1. Исследование изоморфизма эволюционно зрелых
суперэлитных плазменных колец, орбит планетарных и спутниковых систем и
орбит электронов в Боровской модели атома водорода. Исследование
изоморфизма собственного вращения планет как реликтов эволюционно зрелых элитных
плазменных колец и квантовых ротаторов бозонного и фермионного типов. Анализ
динамики вращающихся КА с МГД-элементом в контуре управления пространственным
положением КА при наличии отсеков, частично заполненных жидкостью, и упругой
штыревой антенны. Рассмотрение проблемы одноосной и трехосной ориентации КА
нового поколения с использованием тороидальных и сферических МГД-элементов. Рассмотрение
проблемы использования энергии импульсного магнитного поля для ускорения струи
ионизированного газа (холодной плазмы).
1. Получены некоторые новые результаты,
связанные с квантованием параметров планетарной Солнечной системы и спутниковых
систем. Исследованы общие адиабатические инварианты, включающие орбитальные
квантовые числа планет Солнечной системы и квантовые числа, характеризующие их
собственное вращение (спин). Получены новые результаты в области квантование
параметров, относящихся к спутниковым и к экзопланетным системам.
2. Рассмотрена проблема стабилизации
вращающегося космического аппарата с упругой штыревой антенной, расположенной
вдоль оси его вращения, при использовании магнитогидродинамического (МГД)
элемента в качестве исполнительного элемента в контуре управления
пространственным положением КА и датчика направления на Солнце в качестве
измерителя. На данном этапе исследования решена задача устойчивости
стационарного и нестационарного режимов вращения КА с упругой антенной при
наличии полости, частично заполненной маловязкой жидкостью, на примере
гироскопически неустойчивого ИСЗ «Авроральный зонд».
3. Исследован один из аспектов одноосной и
трехосной ориентации КА с МГД-элементом в контуре управления, а именно,
применение режима странного аттрактора для сканирования небесной сферы и
нахождения направления в заданную ее точку, в частности, направления на Солнце.
4. Проведен цикл работ по исследованию
эффективности использования МГД-эффектов для ускорения плазменной струи,
вытекающей из сопла ЖРД. Рассмотрен ряд методов повышения термического кпд
цикла и удельной тяги двигателя.
5. Продолжена работа по динамике океана спутника
Юпитера «Европа». Часть результатов, представленных в журнал «Космические
исследования, вышла в свет в виде двух статей.
г.н.с.
д.ф.-м.н. Б.И. Рабинович, тел. 333-50-45
2. Исследования
динамики полета и управления космических аппаратов с солнечным парусом с
изменяемой отражательной способностью.
Разработка концепций и алгоритмов управления группировками космических
аппаратов при построении и поддержании заданной конфигурации группировок путем
использования солнечного паруса с изменяемыми отражательными характеристиками.
Проведены исследования возможностей удержания
заданной конфигурации группировки спутников Земли, за счет использования
солнечного паруса с управляемыми отражательными характеристиками.
Рассматривались почти круговые орбиты с высотами более
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78,
E-mail: neismont@iki.rssi.ru
3. Разработка
способов управления движения космических приборов, состоящих из элементов, размещаемых на нескольких аппаратах.
Разработанные по пункту 2 методики были
применены к случаю полета аппаратов, движущихся в окрестности точек либрации и
решающих задачи исследования Солнца с помощью коронографов, когда на одном из
аппаратов располагается экран, а на другом датчики, регистрирующие излучение
короны Солнца, так что для обеспечения оптимальных условий измерений необходимо
в относительном движении аппаратов удерживать их на одной прямой, проходящей
через центр Солнца. Было показано, что с помощью солнечного паруса эта задача в
принципе решаема.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
4. Разработка методов управления
ориентацией малых космических аппаратов с минимальным составом измерительных и
исполнительных элементов, предназначенных для околоземных и межпланетных
полетов. Разработка методов управления малыми космическими аппаратами,
использующими двигатели малой тяги для решения задач перехода на высокие
околоземные орбиты и в межпланетных миссиях, в том числе построение алгоритмов
управления ориентацией.
Были исследованы случаи управления
космическим аппаратом с массой, не превышающей
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78,
E-mail: neismont@iki.rssi.ru
5. Разработка системы программ навигационной
поддержки и планирования операций для проекта "Фобос-Грунт" с учетом
реализации миссии в режиме взаимодействия с европейским проектом "ExoMars".
Разработаны алгоритмы для определения
интервалов полета орбитального аппарата Фобос-Грунт,
удовлетворяющих требованиям экспериментов по просвечиванию атмосферы Марса
и условиям по видимости с Земли. Исследованы концепции построения программ
управления аппаратом Фобос-Грунт в
режимах его совместной работы с аппаратом ExoMars.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78,
E-mail: neismont@iki.rssi.ru
6. Исследование возможностей и методов
управления движением астероидов.
Проанализированы возможности управления
движением астероидов сравнительно небольших размеров, порядка
Результаты были доложены на Международном
Симпозиуме по астероидной опасности на Мальте в октябре 2009 года.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
7. Анализ и построение схем орбитальных
группировок для дистанционного зондирования Земли при решении
народно-хозяйственных задач. Оптимизация параметров группировок.
Проведены исследования различных вариантов
построения группировок спутников сельскохозяйственного назначения. При этом
были рассмотрены ограничения на выбор орбит и числа спутников в группировке, определяемые
условиями полного покрытия территории России в течение суток, а также условиями
непрерывного приема собираемой приборами
информации имеющимися наземными станциями соответствующих ведомств России. Учитывались ограничения по условиям
наблюдений сельскохозяйственных угодий, таких как допустимые углы луча зрения с
поверхностью, возможные полосы наблюдения, угол Солнца над горизонтом. Были
проанализированы способы поддержания заданной ориентации аппаратов. Проведены
оценки необходимых запасов рабочего тела на борту аппаратов, позволяющие
парировать ошибки выведения на рабочую орбиту и заданное полжение на ней, а
также поддерживать заданные параметры орбиты в условиях воздействия атмосферы.
По результатам анализа были выпущены эскизные проекты системы в целом и
предлагаемых для системы космических аппаратов.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
8. Дальнейшее исследование
нестационарных процессов в динамических системах при случайных возмущениях.
Разработка алгоритмов управления, обеспечивающих требуемую надежность системы.
Продолжено исследование
нестационарных процессов в динамических системах со случайными возмущениями. В
работах 2007-
Проводились работы по ГРАНТу
РФФИ 08-01-00068.
в.н.с., д.ф.-м.н. А. С. Ковалева, a.kovaleva@ru.net
9. Дальнейшее исследование особенностей эволюции
орбит ИСЗ и времени их существования при совместном влиянии несферичности
центрального тела и гравитационных возмущений со стороны внешних тел.
В пятимерном пространстве начальных условий ![]() с координатами
с координатами ![]() , где
, где ![]() – радиус планеты,
– радиус планеты, ![]() – фокальный параметр,
вводятся в рассмотрение многообразия
I, II, III
на плоскости
– фокальный параметр,
вводятся в рассмотрение многообразия
I, II, III
на плоскости ![]() при произвольных фиксированных
значениях
при произвольных фиксированных
значениях ![]() . Многообразию I
принадлежат значения
. Многообразию I
принадлежат значения ![]() , при которых орбита в процессе долгопериодической эволюции
пересекает поверхность планеты при любых значениях
, при которых орбита в процессе долгопериодической эволюции
пересекает поверхность планеты при любых значениях ![]() .
.
Многообразию II принадлежат значения ![]() , при которых орбита при всех значениях
, при которых орбита при всех значениях ![]() не пересекает
поверхность планеты, а многообразию III
– значения
не пересекает
поверхность планеты, а многообразию III
– значения ![]() , при которых орбита пересекает или не пересекает поверхность
планеты, в зависимости от значения
, при которых орбита пересекает или не пересекает поверхность
планеты, в зависимости от значения ![]() .
.
Границы, разделяющие многообразия I, II,
и III, найдены для двух
случаев, соответствующих двум значениям ![]() и
и ![]() при одном и том же значении
при одном и том же значении
![]() . Эти границы показаны на рисунке. В области
. Эти границы показаны на рисунке. В области ![]() , показанной самой густой тонировкой радиус перицентра орбиты
спутника меньше радиуса планеты. Вертикальная утолщенная линия соответствует
безразмерному радиусу
, показанной самой густой тонировкой радиус перицентра орбиты
спутника меньше радиуса планеты. Вертикальная утолщенная линия соответствует
безразмерному радиусу ![]() гравитационной сферы
доминирующего влияния возмущений от сжатия Земли над возмущениями от внешних
тел. Отметим, что при значении
гравитационной сферы
доминирующего влияния возмущений от сжатия Земли над возмущениями от внешних
тел. Отметим, что при значении ![]() в отсутствие
возмущений, обусловленных сжатием планеты, вся область значений
в отсутствие
возмущений, обусловленных сжатием планеты, вся область значений ![]() ,
, ![]() представляет
собой многообразие I.
представляет
собой многообразие I.
Проведенное исследование имеет
непосредственное отношение к задаче проектирования долгоживущих орбит
спутников планет с учетом гравитационных возмущений.
Работа выполнена при частичной поддержке Гранта РФФИ № 09-08-00204.
Работа,
выполненная вне плана:
О квазипериодичности тесных сближений двух космических тел на близких, почти
круговых орбитах.
Актуальность исследования квазипериодичности
тесных сближений космических тел связана с проблемой астероидной
опасности. В качестве примера рассматривается открытый в 2004 году, астероид
(99942) Апофис, тесное сближение которого с Землей ожидается в 2029 году в
окрестности точки MOID (Minimum Orbit Intersection Distance), расстояние которой от орбиты Земли
составляет около
Тесные сближения с массивными телами: Венерой
или Землёй приводят к сильным гравитационным возмущениям орбиты Апофиса,
практически «мгновенно» изменяя вектор скорости гелиоцентрического движения
Апофиса. Это приводит к изменению орбитальных элементов Апофиса в
гелиоцентрической системе координат. После сближения 13 апреля 2029 орбита
претерпевает значительные изменения, однако, точка MOID остается на месте, а вторая точка
пересечения проекции орбиты Апофиса с орбитой Земли перемещается ближе к
перигелию. Земля походит через эту точку 12 сентября на расстоянии около 3.5
млн. км от орбиты Апофиса. Выраженный в годах
орбитальный период Апофиса приобретает новое значение T = 1.16 (вместо старого![]() )
)
Судя по положению орбиты Апофиса относительно
орбит Земли, Венеры и Марса, после сближения 2029 развитие событий будет определяться
только тесными сближениями Апофиса с Землёй. Попробуем сделать прогноз опасных сближений после 2029, исходя из
имеющихся на сегодня данных о номинальной орбите
Апофиса.
Цикличность тесных сближений
определяется значением синодического периода (периода одноименных конфигураций, в частности, периода тесных
сближений с Землёй), который выражается через орбитальный период астероида T формулой P = T/(T – 1) = 7.2945 года. Возьмем в
качестве точки отсчета t0 дату тесного сближения 2029.
Череда следующих тесных сближений
будет происходить в моменты времени, близкие к значениям ![]() . Но серия эти сближений происходит в разных точках орбиты
Земли. Только при значении
. Но серия эти сближений происходит в разных точках орбиты
Земли. Только при значении ![]() , достаточно близком к (ближайшему) целому числу, очередное
сближение может оказаться вблизи той точки земной орбиты, от которой ведется
отсчет серии. Таким свойством обладают значения 7P = 51.062, 10P = 72.945 и 17P = 124.007. Исходя из этого,
определим годы серии тесных сближений в окрестности точки MOID после 2029: 2080, 2102, 2153.
Численные расчеты, полученные, исходя из модели слабо возмущённого движения
астероида по номинальной орбите, дают даты и дистанции этих сближений: 9.IV.2080 – 9.86 млн. км; 24.IV.2102 – 7.14 млн. км; 15.IV.2153 – 3.28 млн. км. Дальнейшие
определения орбиты астероида Апофис, основанные на новых наблюдениях в годы,
предшествующие тесному сближению 2029, позволят уточнить сроки его очередного
опасного сближения с Землёй.
, достаточно близком к (ближайшему) целому числу, очередное
сближение может оказаться вблизи той точки земной орбиты, от которой ведется
отсчет серии. Таким свойством обладают значения 7P = 51.062, 10P = 72.945 и 17P = 124.007. Исходя из этого,
определим годы серии тесных сближений в окрестности точки MOID после 2029: 2080, 2102, 2153.
Численные расчеты, полученные, исходя из модели слабо возмущённого движения
астероида по номинальной орбите, дают даты и дистанции этих сближений: 9.IV.2080 – 9.86 млн. км; 24.IV.2102 – 7.14 млн. км; 15.IV.2153 – 3.28 млн. км. Дальнейшие
определения орбиты астероида Апофис, основанные на новых наблюдениях в годы,
предшествующие тесному сближению 2029, позволят уточнить сроки его очередного
опасного сближения с Землёй.
Работа, выполненная вне плана: Анализ долговременной эволюции
орбит космического аппарата «Спектр-Р»
(Радиоастрон), соответствующих официальным начальным
условиям для четырех возможных дат старта,
для предварительного планирования эксперимента «Плазма–Ф» на борту этого КА.
Результаты работы оформлены в виде PowerPoint презентации: «Проект «Спектр-Р», эксперимент «Плазма-Ф».
Анализ долговременной эволюции орбит, соответствующих официальным начальным
условиям».
Зам.
научн. рук. эксперимента в.н.с. д.ф.-м.н. Застенкер Г.Н., отд.54
Беляева Н.П., с.н.с. к.ф.-м.н.
В. И. Прохоренко, тел. 333-50-45
10.
Проведение исследований по проекту MetNet создания сети малых метеостанций на Марсе
(науч. рук. В.М. Линкин).
В рамках исследования траекторий полета к
Марсу с электрореактивной (малой) тягой был проведен анализ участка разгона КА
малой тягой у Земли. Получены характеристики многовитковых траекторий разгона и
рассчитаны затраты рабочего тела (ксенона) на разгон для разных значений
параметров электрореактивного двигателя (таких, как удельный импульс и сила
тяги) и для продолжительности разгона от 2–3 месяцев до года. Путем численного
анализа показано, что оптимальным является достижение в результате такого
разгона асимптотической скорости в среднем около 0,8 км/с с доразгоном до
значения этой скорости, необходимого для перелета к Марсу (3–4 км/с в
зависимости от года запуска и продолжительности полета) на гелиоцентрическом
участке перелета.
По
сравнению с ранее проводившимся подобным анализом данный анализ является более
детальным и точным.
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
11.
Модификация программного обеспечения для оптимизации межпланетных перелетов с
большой и с малой тягой. Разработка математических методов
и создание программного обеспечения для нахождения оптимальных межорбитальных
перелетов с малой тягой по многовитковым спиральным траекториям вблизи планет.
Созданный Сухановым А.А. комплекс программ
оптимизации межпланетных перелетов с большой (импульсной) тягой представляет
собой мощный инструмент для расчета и анализа оптимальных перелетов с облетом
многих небесных тел Солнечной системы. Модификация этого комплекса была
направлена на повышение его возможностей и на более наглядное представление
результатов его работы. Были проделаны следующие работы по совершенствованию
комплекса:
1. Увеличено
с 20 до 50 максимальное число небесных тел, которые могут быть охвачены одной
траекторией КА.
2. Помимо
перелетов к небесным телам, комплекс позволяет также задавать области
пространства, которые необходимо достичь, или траектории КА с заданными
параметрами. Были существенно расширены возможности задания таких областей и
траекторий.
3. Создана
программа Animation анимации
межпланетных перелетов. Эта программа позволяет наблюдать реальное движение КА,
планет Солнечной системы и других небесных тел, участвующих в данном перелете.
Движение может быть представлено либо в проекции на плоскость эклиптики, либо в
двух проекциях, либо в перспективной проекции, как если бы движение наблюдалось
из заданной точки пространства (т.е. движение наблюдается под заданными углами
с заданного расстояния). Также была создана модификация AnimationDemo этой программы, предназначенная для
подготовки презентаций.
Модификация
программ оптимизации перелетов с электрореактивной (малой) тягой заключалась в
подготовке программ LTanimation и LTanimationDemo, представляющих
анимацию перелетов с малой тягой и обладающих такими же возможностями, как
программы Animation и AnimationDemo.
Результаты
работы представлены в виде программ на языке фортран и рабочих материалов.
с.н.с.,
к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
12. Исследование
траекторий полета к спутнику Юпитера Европе по проекту «Лаплас»; оценка дозы радиации КА в
радиационных поясах Юпитера.
Были проанализированы следующие участки
траектории перелета КА от Земли к спутнику Юпитера Европе:
1. переход
КА с низкой круговой орбиты спутника Земли на межпланетную траекторию;
2. пролеты
КА в сфере действия Земли во время двух гравитационных маневров;
3. межпланетные
участки траектории КА;
4. траектория
КА в сфере действия Юпитера с многократными гравитационными маневрами у Ио,
Ганимеда и Европы для разных вариантов такого маневрирования.
На
базе этого анализа были составлены таблицы положений КА с привязкой ко времени
на всех перечисленных участках. С помощью этих таблиц М.В. Подзолко (НИИЯФ МГУ)
произвел анализ доз радиации, получаемых КА в радиационных поясах Земли и
Юпитера, а также доз солнечной радиации на межпланетной траектории. Результаты
анализа были представлены на Международной конференции по проекту «Лаплас» в
ИКИ 9–13 февраля 2009г. и на European Planetary Science Congress (Europlanet 2009) в
Потсдаме (Германия) 13–17 сентября 2009г. (докладчик М.В. Подзолко).
с.н.с.,
к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
13. Анализ существующих и
будущих наблюдений и оцениваемых параметров астероида Апофис в рамках работ по
предотвращению астероидной опасности; построение траекторий полета к этому
астероиду; участие в оценивании точности определения орбиты астероида по его
наблюдениям.
Астероид Апофис периодически подходит к Земле
на близкое расстояние, что в будущем может привести к его столкновению с Землей. Поэтому
актуальным является точное определение орбиты астероида. Конечной целью работы
являлась оценка точности, с которой может быть определена орбита астероида по
существующим и будущим измерениям. Были проанализированы астрометрические
измерения астероида Апофис, произведенные в 2004–2006гг., а также
радиолокационные измерения дальности и радиальной скорости этого астероида,
выполненные радиотелескопом Аресибо в 2005–2006гг. На основе этого анализа были
определены условия, при которых такие измерения возможны, а также оценены
точности измерений. Полученные данные использовались для моделирования будущих
измерений вплоть до очередного сближения астероида с Землей в
На
основе существующих и смоделированных будущих измерений Б. Бахшиян и К. Федяев
(отд. 58) провели анализ точности будущего определения орбиты астероида для
разных составов измерений и разных дат, в которые такое определение орбиты производится.
А. Суханов также принимал участие в это работе.
Результаты
работы были представлены на Международной конференции по астероидной опасности
на Мальте 12–16 октября
с.н.с.,
к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
14. Перспективные методы формирования управления
подвижными объектами.
Задачи идеальной линейной
коррекции траектории и некоторые задачи планирования эксперимента сводятся к
обобщенным задачам линейного программирования. Знание выпуклой оболочки конечного множества точек позволяет эффективно
решать задачи оценивания и коррекции движения. Разработан новый скелетный алгоритм решения задач
линейного программирования, который в отличие от
традиционного метода генерации столбцов не приводит к почти вырожденным итерациям и плохо обусловленному базисному решению. Это
позволяет избежать больших вычислительных ошибок и найти оптимум с меньшими затратами.
Метод наименьших модулей позволяет эффективно
обрабатывать данные с аномально большими ошибками. Алгоритм Вейсфельда, позволяющему
найти приближенное решение вариационной проблемы, соответствующей методу
наименьших модулей. На основе теории двойственности выпуклых вариационных задач
получены оценки неоптимальности итераций данного алгоритма, дающие возможность оценить
качество приближенного решения.
Исследовалась задача оптимального управления
пространственной переориентацией вращающегося твердого тела с единичным
тензором инерции. Установлены новые геометрические свойства экстремалей данной
вариационной задачи для невырожденного случая. Подробно описан эффект
«схлопывания» экстремалей и его связь с плоским разворотом. Показано, что для
каждой экстремали справедливы некоторые ранговые свойства. Полученные
результаты основаны на анализе системы уравнений, получаемой в результате
применения формализма принципа максимума Понтрягина (ПМП), и использовании
первых интегралов.
Продемонстрированы два семейства экстремалей
в задаче оптимального по энергозатратам (интегрально-квадратичный функционал)
вращения тела, не обладающего какими-либо свойствами симметрии, которые допускают
явное описание. Идея построения первого семейства основана на использовании
пространственно-временных деформаций уравнений свободного вращения
асимметричного волчка. Второе обнаруженное семейство экстремалей в данной
задаче представляет собой класс плоских вращений – вращений асимметричного тела
относительно неподвижной в инерциальном пространстве оси. Построенные семейства
экстремалей описываются через элементарные и эллиптические функции, и допустимы
только для специальных случаев граничных условий вектора угловой скорости.
Несмотря на то, что строящиеся решения не описывают полностью общего решения
задачи вращения, они, тем не менее, позволяют сделать определенные суждения о
свойствах общего решения.
д.ф.-м.н.
Бахшиян Б.Ц. bbakhshiyan@gmail.com
15. Оценка точности прогноза координат сближения
астероида «Апофис с Землей» в 2029 и 2036 гг.
Для астероида «Апофис» получены
характеристики точности оценок вектора состояния. Рассмотрены различные составы существующих и
планируемых измерений. Учтены погрешности положения измерительных пунктов,
обусловленные ошибками знания параметров орбиты Земли. Расчеты проведены в
предположении о наихудшей корреляции между измерениями. Для этого случая найден оптимальный
состав измерений, доставляющий наилучшую
точность оценивания заданного параметра.
Приведены характеристики точности для более оптимистичного случая, когда
измерения разных типов не коррелированы между собой.
д.ф.-м.н.
Бахшиян Б.Ц. bbakhshiyan@gmail.com
16. Разработка математической модели
описывающей поведение локально однородных континуальных сильно охлажденных
систем под воздействием энергии тектонических преобразований (применительно к
Европе).
Разработаны математические модели описывающей
поведение локально однородных сильно охлажденных систем. При аппроксимации
механических свойств ледяных структур на поверхности Европы, использовались
данные по механическим свойствам воды с учетом тепловых параметров, полученные
в соответствии с теорией экстремальных свойств минимальных монокристаллов.
Рассматривался процесс возможного дефектообразования в ледяных структурах за
счет воздействия энергии тектонических преобразований. В работе использованы
приемы математического моделирования ранее применяемые для анализа и
прогнозирования течения металла при обработке металлов давлением. Опубликованы
статьи, материалы конференций и книга.
д.т.н.
Чумаченко Е.Н. mmkaf@miem.edu.ru
17. Математическое моделирование
взаимодействия объектов с большой разницей температур. Построение модели для
оценки эффективности криоботов.
Осуществлена постановка задачи
математического моделирования взаимодействия объектов с большой разницей
температур. Показано, что в первом приближении целесообразно использование
твердотельного представления при описании механических свойств воды в широком
диапазоне пониженных температур. Построена базовая модель для оценки
эффективности криоботов. Результаты опубликованы.
д.т.н. Чумаченко Е.Н. mmkaf@miem.edu.ru
18. Исследование имитационной
математической модели и анализ гипотез по системам «протаивания» сплошной среды
при низких температурах. Построение начальных оценок эффективности криоботов на
Европе.
Выполнено
исследование имитационной математической модели (в первом приближении) и анализ
гипотез по системам «протаивания» сплошной среды при низких температурах.
Анализ начальных оценок эффективности криоботов позволил предположить
целесообразность их использования на Европе. Намечен новый комплекс
исследований. Полученные результаты были опубликованы.
к.т.н. Логашина И.В. mrsirene@rambler.ru
19. Выполнение расчетов и анализ процессов
взаимодействия объектов с большой разницей температур.
Выполнен
комплекс расчетов по математической модели, описывающей процессы взаимодействия
объектов с большой разницей температур. Полученные материалы были использованы
при анализе температурных процессов и затем систематизированы в публикациях.
Бобер
С.А., тел. 333-24-33
20. Выполнение расчетов, связанных с дискретным
представлением непрерывных объектов сложных пространственных форм.
Были выполнены расчетов,
связанные с дискретным представлением непрерывных объектов сложных
пространственных форм. Полученные материалы опубликованы.
Полякова
Т.В. , тел.333-24-33
21. Создание алгоритмов, необходимых для
надёжного развёртывания длинного троса в космосе.
Для создания алгоритмов, необходимых для
надежного развертывания длинного троса в космосе, математическая модель
выбирается таким образом, чтобы было возможно исследовать как задачу
развёртывания тросовой системы, так и задачу управления различными режимами
орбитальной тросовой системы при полностью развёрнутом тросе. Законы управления
выбираются на основе измерения величины натяжения троса с помощью датчика,
установленного на грузе.
Утверждается, что, несмотря на такое
ограниченное управление, можно реализовать развёртывание троса и управлять
движением троса в плоскости орбиты, в плоскости рыскания и продольными
колебаниями тросовой системы.
д.т.н.
Сидоров И.М., тел.333-14-89
22. Обзор предложений по экспериментам с
использованием вращающихся тросовых систем, транспортирующих полезные грузы в
межпланетном пространстве.
Сделан обзор литературных
данных по экспериментам, в которых использовались тросы. Экспериментальные
исследования тросовых систем начались в 60-е годы прошлого столетия. Проведено
в общей сложности около 30 экспериментов с тросовыми системами; приблизительно
половина из них неудачна. Однако стоящие перед космонавтикой задачи (освоение
Луны, полеты на Марс) настоятельно требуют развития этого направления.
В ИКИ РАН предложен проект
использования вращающихся тросовых систем для межпланетных перелетов. Его
ключевым положением является предложение
о построении группировки космических объектов, которые в совокупности
представляют собой постоянно действующую транспортную трассу. В группировку включены
орбитальные тросовые системы и обменные грузы, которые могут выполнять перелет
от одной тросовой системы к другой. Таким образом, задача выполнения
космических полетов решается поэтапно: сначала строится транспортная трасса в
космическом пространстве, а потом по этой трассе многократно перевозятся грузы
в обоих направлениях.
Очевидно, что реализация такого проекта
связана с решением многочисленных технических и технологических проблем,
которые целесообразно отрабатывать небольшими экспериментами с небольшой
стоимостью. В этой связи необходимо отметить два предложения, одно из которых
сделано российскими учеными (Иванов Н.Н., Сидоров И.М. О возможности реализации
комплексного эксперимента по развертыванию тросовой системы на основе
использования второй ступени ракеты-носителя «Космос 3М» // Полет, 2003. №11.
С28-34) второе – американским (Robert P. Hoyt. The μTORQUE Momentum-Exchange Tether Experiment. Работа
поддерживалась NASA).
Оба эксперимента предлагаются как попутные, на выполнивших свою основную миссию
носителях.
д.т.н. Сидоров И.М., тел.333-14-89
23. Математическое
моделирование перелёта груза по трассе Земля-Луна с целью определения скоростей
вращения тросовых систем вокруг Земли и Луны, а также вокруг собственных
центров масс - скоростей, необходимых для реализации контактов транспортируемых
грузов.
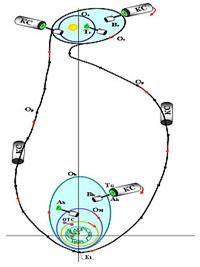 Проведено математическое моделирование
траектории движения груза по трассе Земля – Луна с целью определения скоростей
вращения тросовых систем вокруг Земли и Луны, а также вокруг собственных
центров масс – скоростей, необходимых для реализации контактов грузов.
Проведено математическое моделирование
траектории движения груза по трассе Земля – Луна с целью определения скоростей
вращения тросовых систем вокруг Земли и Луны, а также вокруг собственных
центров масс – скоростей, необходимых для реализации контактов грузов.
Рассмотрен вариант системы, который
показывает принципиальную возможность создания трассы Земля-Луна для
циклических перелётов по ней полезных грузов.
д.т.н.
Сидоров И.М., тел.333-14-89
Рис. Схема движения
космической станции по трассе Земля-Луна.
24. Способы управления прецизионным
сближением и стыковкой контактирующих объектов в космическом пространстве.
Управление прецизионным сближением объектов в
космическом пространстве (в частности, груза и концевого блока ОТС) имеет своей
целью обеспечить в определенный момент времени совпадение координат и скоростей
движения объектов (как по величине, так и по направлению) для реализации их
стыковки. Управление предлагается осуществлять с помощью новой схемы с
применением алгоритма управления «с моделью» и решением краевой задачи.
Прецизионное
сближение необходимо проводить с помощью автономной системы ориентации,
использующей показания опто-электронных устройств; на грузе должны быть также
установлены двигатели коррекции, БЦВМ и БИНС. В комплект БИНС входят
гироскопические датчики определения вектора угловой скорости, акселерометры и
спецвычислитель, реализующий программу определения углового положения и
координат центра масс объекта.
Информация
с опто-электронных устройств и БИНС снимается в автоматическом режиме с
тактовой частотой 15-20Гц. Обработка полученной информации позволяет определять
с той же частотой взаимное положение
сближающихся объектов, скорость и импульсы, которые подаются на двигатели
коррекции. Быстродействие современной вычислительной техники и исполнительных
органов с запасом позволяют выполнять такое управление.
Сделано
предложение по конструкции стыковочного узла. Рассмотрен процесс перестыковки
на примере обмена контейнера, доставленного ракетой-носителем, на контейнер,
установленный на блоке пращи.
д.т.н.
Сидоров И.М., тел.333-14-89
25.
Исследования нелинейной динамики сложных систем высокой размерности
испытывающих бифуркации на разных уровнях и разработка методов управления сложными процессами в таких
системах.
Проведено исследование динамики системы с
высокой размерностью, описываемой 18 связанными ОДУ, находящейся под
воздействием периодической внешней стимулирующий силы. Обнаружено, что
существуют такие области параметров стимуляции, при которых структура
бифуркационых диаграмм системы существенно зависит от начальных условий,
поэтому для представления всех устойчивых состояний исследуемой системы
требуется расчет не одной, а множества связанных бифуркационных диаграмм.
Установлено, что, изменение параметров стимуляции приводит к количественным
изменениям, таким как сжатие/расширение или сдвиг общей картины бифуркационных
диаграмм, при этом структура бифуркационых диаграмм сохраняется. Кроме того,
показано, что малые отклонения в
параметрах системы могут приводить к значительным качественным перестройкам,
т. е. к изменениям структуры бифуркационных диаграмм. Определение
предельных значений параметров стимуляции, при которых многоуровневая система
способна функционировать в заданном режиме, а также выявление параметров,
оказывающих существенное влияние на динамику сложной системы, представляет
собой важную практическую задачу. Предлагаемый подход не ограничивается частным
примером рассмотренной системы, и может быть использован при анализе сложных многоуровневых
систем различной природы.
д.
ф.-м. н. Е. Д. Суровяткина, т. (495)7440436,
selena@iki.rssi.ru